 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection, Recognition and Pose Estimation of Tabletop Objects
Sep 01, 2024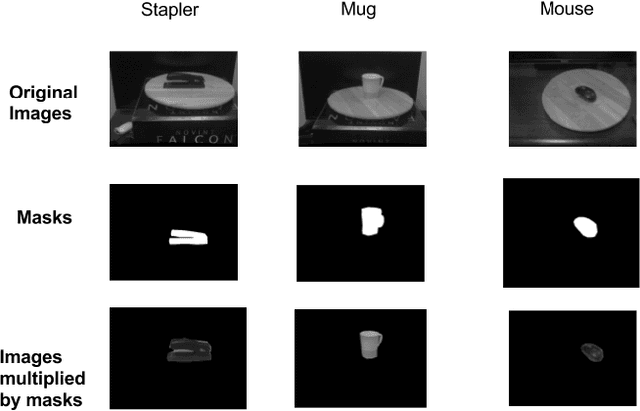
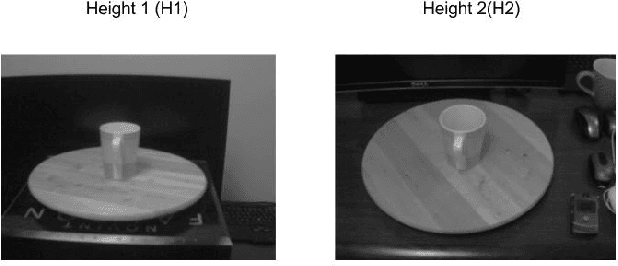
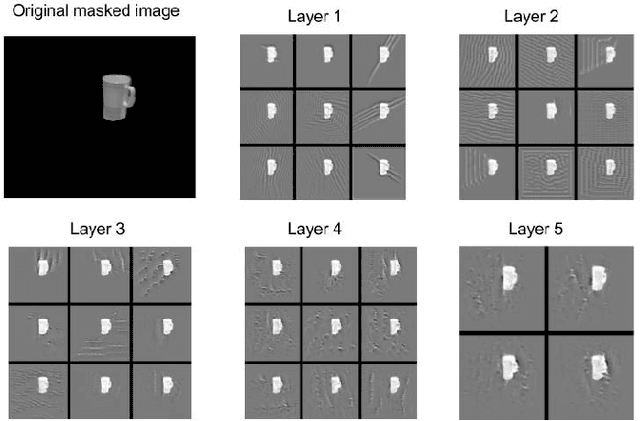
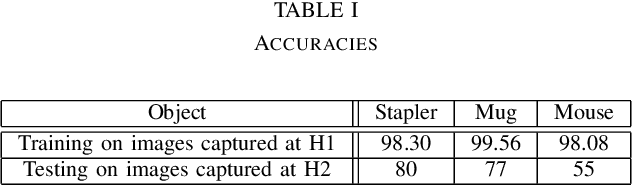
The problem of cleaning a messy table using Deep Neural Networks is a very interesting problem in both social and industrial robotics. This project focuses on the social application of this technology. A neural network model that is capable of detecting and recognizing common tabletop objects, such as a mug, mouse, or stapler is developed. The model also predicts the angle at which these objects are placed on a table,with respect to some reference. Assuming each object has a fixed intended position and orientation on the tabletop, the orientation of a particular object predicted by the deep learning model can be used to compute the transformation matrix to move the object from its initial position to the intended position. This can be fed to a pick and place robot to carry out the transfer.This paper talks about the deep learning approaches used in this project for object detection and orientation estimation.