 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Naive Bayes Nearest Neighbor for Image Classification
Dec 01, 2011

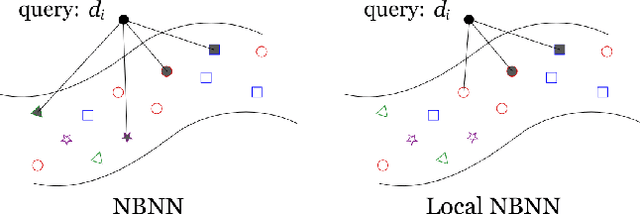

We present Local Naive Bayes Nearest Neighbor, an improvement to the NBNN image classification algorithm that increases classification accuracy and improves its ability to scale to large numbers of object classes. The key observation is that only the classes represented in the local neighborhood of a descriptor contribute significantly and reliably to their posterior probability estimates. Instead of maintaining a separate search structure for each class, we merge all of the reference data together into one search structure, allowing quick identification of a descriptor's local neighborhood. We show an increase in classification accuracy when we ignore adjustments to the more distant classes and show that the run time grows with the log of the number of classes rather than linearly in the number of classes as did the original. This gives a 100 times speed-up over the original method on the Caltech 256 dataset. We also provide the first head-to-head comparison of NBNN against spatial pyramid methods using a common set of input features. We show that local NBNN outperforms all previous NBNN based methods and the original spatial pyramid model. However, we find that local NBNN, while competitive with, does not beat state-of-the-art spatial pyramid methods that use local soft assignment and max-pooling.
Semantic Robot Vision Challenge: Current State and Future Directions
Aug 19, 2009The Semantic Robot Vision Competition provided an excellent opportunity for our research lab to integrate our many ideas under one umbrella, inspiring both collaboration and new research. The task, visual search for an unknown object, is relevant to both the vision and robotics communities. Moreover, since the interplay of robotics and vision is sometimes ignored, the competition provides a venue to integrate two communities. In this paper, we outline a number of modifications to the competition to both improve the state-of-the-art and increase participation.