 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Star Tracking under Spacecraft Jitter: the e-STURT Dataset
May 19, 2025Jitter degrades a spacecraft's fine-pointing ability required for optical communication, earth observation, and space domain awareness. Development of jitter estimation and compensation algorithms requires high-fidelity sensor observations representative of on-board jitter. In this work, we present the Event-based Star Tracking Under Jitter (e-STURT) dataset -- the first event camera based dataset of star observations under controlled jitter conditions. Specialized hardware employed for the dataset emulates an event-camera undergoing on-board jitter. While the event camera provides asynchronous, high temporal resolution star observations, systematic and repeatable jitter is introduced using a micrometer accurate piezoelectric actuator. Various jitter sources are simulated using distinct frequency bands and utilizing both axes of motion. Ground-truth jitter is captured in hardware from the piezoelectric actuator. The resulting dataset consists of 200 sequences and is made publicly available. This work highlights the dataset generation process, technical challenges and the resulting limitations. To serve as a baseline, we propose a high-frequency jitter estimation algorithm that operates directly on the event stream. The e-STURT dataset will enable the development of jitter aware algorithms for mission critical event-based space sensing applications.
On-chain Validation of Tracking Data Messages (TDM) Using Distributed Deep Learning on a Proof of Stake (PoS) Blockchain
Sep 03, 2024



Trustless tracking of Resident Space Objects (RSOs) is crucial for Space Situational Awareness (SSA), especially during adverse situations. The importance of transparent SSA cannot be overstated, as it is vital for ensuring space safety and security. In an era where RSO location information can be easily manipulated, the risk of RSOs being used as weapons is a growing concern. The Tracking Data Message (TDM) is a standardized format for broadcasting RSO observations. However, the varying quality of observations from diverse sensors poses challenges to SSA reliability. While many countries operate space assets, relatively few have SSA capabilities, making it crucial to ensure the accuracy and reliability of the data. Current practices assume complete trust in the transmitting party, leaving SSA capabilities vulnerable to adversarial actions such as spoofing TDMs. This work introduces a trustless mechanism for TDM validation and verification using deep learning over blockchain. By leveraging the trustless nature of blockchain, our approach eliminates the need for a central authority, establishing consensus-based truth. We propose a state-of-the-art, transformer-based orbit propagator that outperforms traditional methods like SGP4, enabling cross-validation of multiple observations for a single RSO. This deep learning-based transformer model can be distributed over a blockchain, allowing interested parties to host a node that contains a part of the distributed deep learning model. Our system comprises decentralised observers and validators within a Proof of Stake (PoS) blockchain. Observers contribute TDM data along with a stake to ensure honesty, while validators run the propagation and validation algorithms. The system rewards observers for contributing verified TDMs and penalizes those submitting unverifiable data.
Event-based Star Tracking via Multiresolution Progressive Hough Transforms
Jun 19, 2019
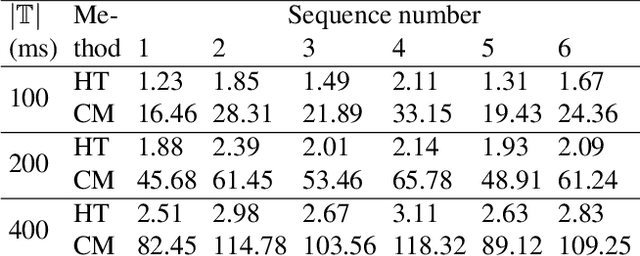


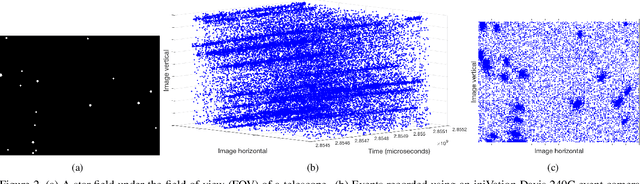
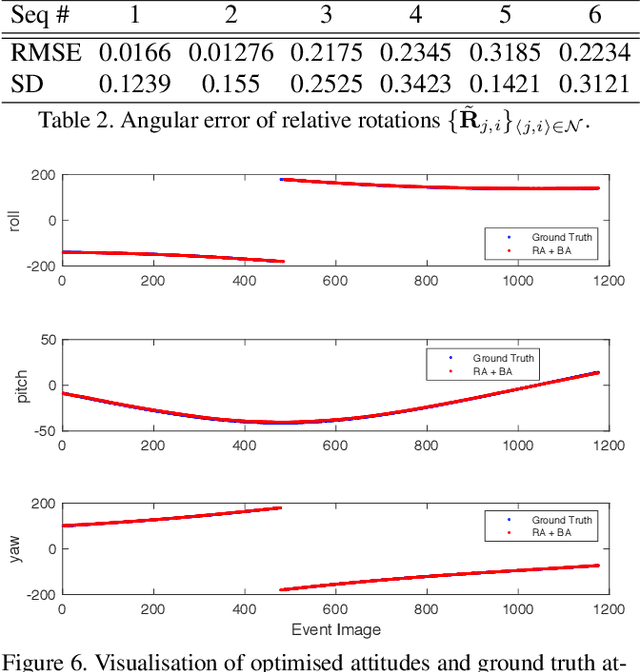
Star trackers are state-of-the-art attitude estimation devices which function by recognising and tracking star patterns. Most commercial star trackers use conventional optical sensors. A recent alternative is to use event sensors, which could enable more energy efficient and faster star trackers. However, this demands new algorithms that can efficiently cope with high-speed asynchronous data, and are feasible on resource-constrained computing platforms. To this end, we propose an event-based processing approach for star tracking. Our technique operates on the event stream from a star field, by using multiresolution Hough Transforms to time-progressively integrate event data and produce accurate relative rotations. Optimisation via rotation averaging is then used to fuse the relative rotations and jointly refine the absolute orientations. Our technique is designed to be feasible for asynchronous operation on standard hardware. Moreover, compared to state-of-the-art event-based motion estimation schemes, our technique is much more efficient and accurate.
Star Tracking using an Event Camera
Dec 07, 2018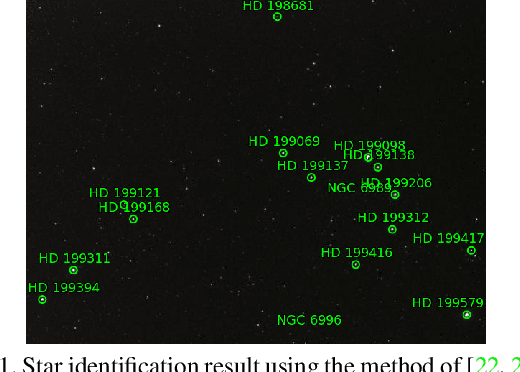

Star trackers are primarily optical devices that are used to estimate the attitude of a spacecraft by recognising and tracking star patterns. Currently, most star trackers use conventional optical sensors. In this application paper, we propose the usage of event sensors for star tracking. There are potentially two benefits of using event sensors for star tracking: lower power consumption and higher operating speeds. Our main contribution is to formulate an algorithmic pipeline for star tracking from event data that includes novel formulations of rotation averaging and bundle adjustment. In addition, we also release with this paper a dataset for star tracking using event cameras. With this work, we introduce the problem of star tracking using event cameras to the computer vision community, whose expertise in SLAM and geometric optimisation can be brought to bear on this commercially important application.