 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Infeasible Tasks Feasible: Planning to Reconfigure Disconnected 3D Environments with Movable Objects
Jan 06, 2026Several planners have been developed to compute dynamically feasible, collision-free robot paths from an initial to a goal configuration. A key assumption in these works is that the goal region is reachable; an assumption that often fails in practice when environments are disconnected. Motivated by this limitation, we consider known 3D environments comprising objects, also called blocks, that form distinct navigable support surfaces (planes), and that are either non-movable (e.g., tables) or movable (e.g., boxes). These surfaces may be mutually disconnected due to height differences, holes, or lateral separations. Our focus is on tasks where the robot must reach a goal region residing on an elevated plane that is unreachable. Rather than declaring such tasks infeasible, an effective strategy is to enable the robot to interact with the environment, rearranging movable objects to create new traversable connections; a problem known as Navigation Among Movable Objects (NAMO). Existing NAMO planners typically address 2D environments, where obstacles are pushed aside to clear a path. These methods cannot directly handle the considered 3D setting; in such cases, obstacles must be placed strategically to bridge these physical disconnections. We address this challenge by developing BRiDGE (Block-based Reconfiguration in Disconnected 3D Geometric Environments), a sampling-based planner that incrementally builds trees over robot and object configurations to compute feasible plans specifying which objects to move, where to place them, and in what order, while accounting for a limited number of movable objects. To accelerate planning, we introduce non-uniform sampling strategies. We show that our method is probabilistically complete and we provide extensive numerical and hardware experiments validating its effectiveness.
Minimum-Violation Temporal Logic Planning for Heterogeneous Robots under Robot Skill Failures
Oct 22, 2024In this paper, we consider teams of robots with heterogeneous skills (e.g., sensing and manipulation) tasked with collaborative missions described by Linear Temporal Logic (LTL) formulas. These LTL-encoded tasks require robots to apply their skills to specific regions and objects in a temporal and logical order. While existing temporal logic planning algorithms can synthesize correct-by-construction paths, they typically lack reactivity to unexpected failures of robot skills, which can compromise mission performance. This paper addresses this challenge by proposing a reactive LTL planning algorithm that adapts to unexpected failures during deployment. Specifically, the proposed algorithm reassigns sub-tasks to robots based on their functioning skills and locally revises team plans to accommodate these new assignments and ensure mission completion. The main novelty of the proposed algorithm is its ability to handle cases where mission completion becomes impossible due to limited functioning robots. Instead of reporting mission failure, the algorithm strategically prioritizes the most crucial sub-tasks and locally revises the team's plans, as per user-specified priorities, to minimize mission violations. We provide theoretical conditions under which the proposed framework computes the minimum violation task reassignments and team plans. We provide numerical and hardware experiments to demonstrate the efficiency of the proposed method.
Resilient Temporal Logic Planning in the Presence of Robot Failures
May 09, 2023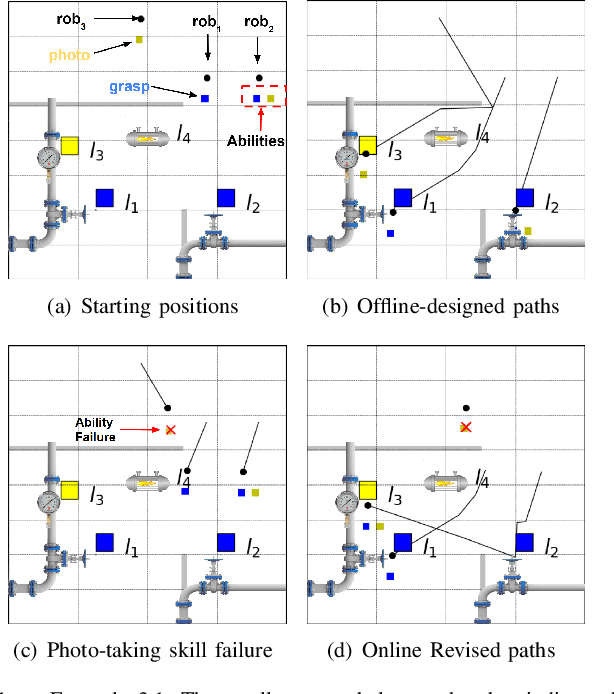
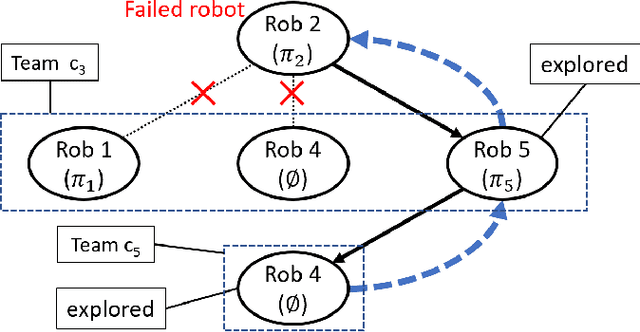

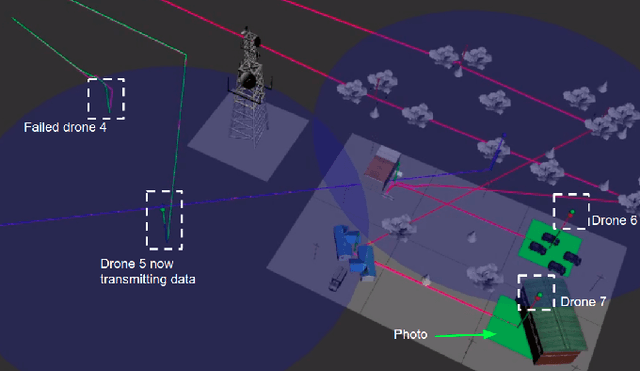
Several task and motion planning algorithms have been proposed recently to design paths for mobile robot teams with collaborative high-level missions specified using formal languages, such as Linear Temporal Logic (LTL). However, the designed paths often lack reactivity to failures of robot capabilities (e.g., sensing, mobility, or manipulation) that can occur due to unanticipated events (e.g., human intervention or system malfunctioning) which in turn may compromise mission performance. To address this novel challenge, in this paper, we propose a new resilient mission planning algorithm for teams of heterogeneous robots with collaborative LTL missions. The robots are heterogeneous with respect to their capabilities while the mission requires applications of these skills at certain areas in the environment in a temporal/logical order. The proposed method designs paths that can adapt to unexpected failures of robot capabilities. This is accomplished by re-allocating sub-tasks to the robots based on their currently functioning skills while minimally disrupting the existing team motion plans. We provide experiments and theoretical guarantees demonstrating the efficiency and resiliency of the proposed algorithm.
Multi-robot Mission Planning in Dynamic Semantic Environments
Sep 13, 2022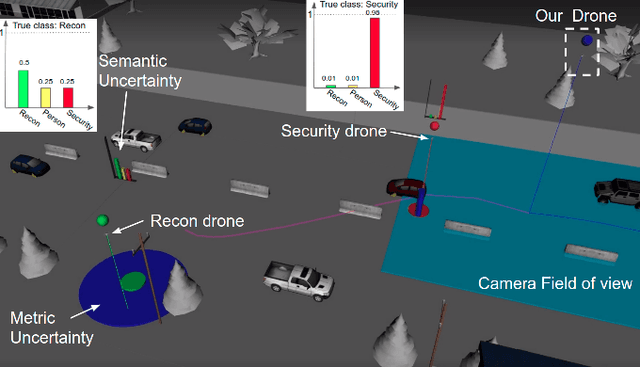
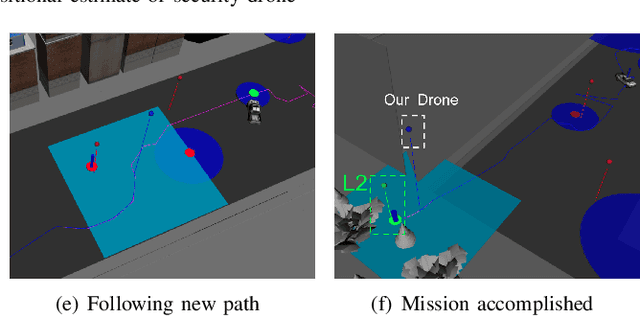
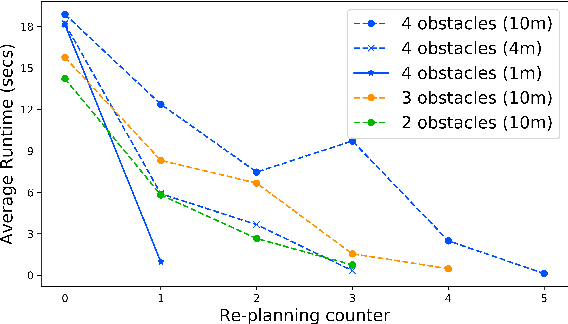
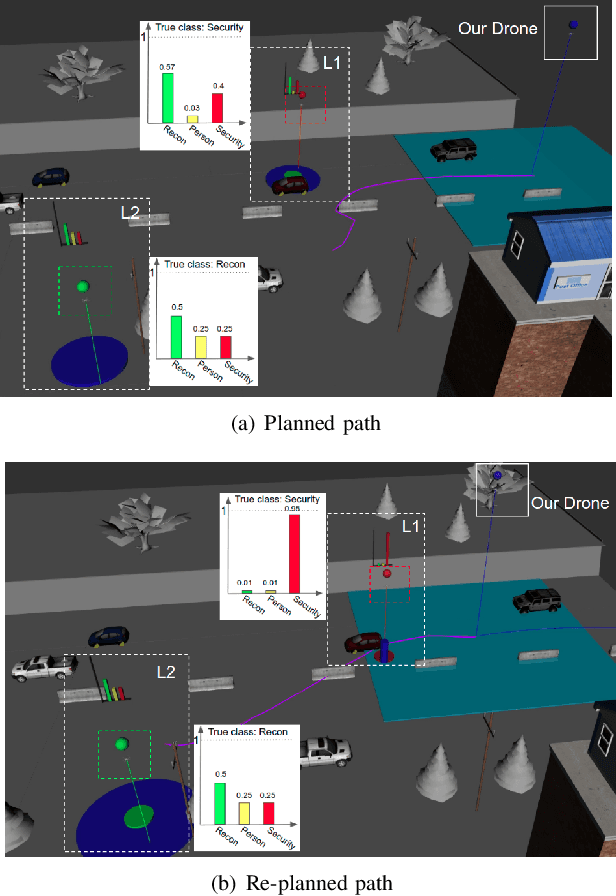
This paper addresses a new semantic multi-robot planning problem in uncertain and dynamic environments. Particularly, the environment is occupied with non-cooperative, mobile, uncertain labeled targets. These targets are governed by stochastic dynamics while their current and future positions as well as their semantic labels are uncertain. Our goal is to control mobile sensing robots so that they can accomplish collaborative semantic tasks defined over the uncertain current/future positions and labels of these targets. We express these tasks using Linear Temporal Logic (LTL). We propose a sampling-based approach that explores the robot motion space, the mission specification space, as well as the future configurations of the labeled targets to design optimal paths. These paths are revised online to adapt to uncertain perceptual feedback. To the best of our knowledge, this is the first work that addresses semantic mission planning problems in uncertain and dynamic semantic environments. We provide extensive experiments that demonstrate the efficiency of the proposed method
Verified Compositions of Neural Network Controllers for Temporal Logic Control Objectives
Sep 13, 2022
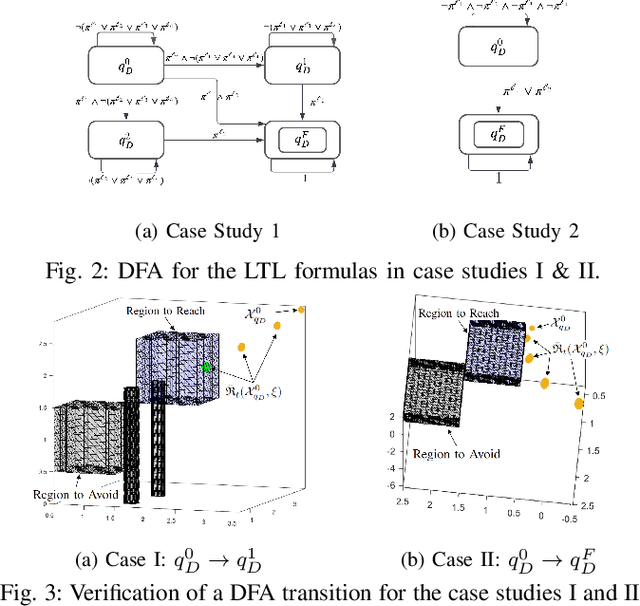
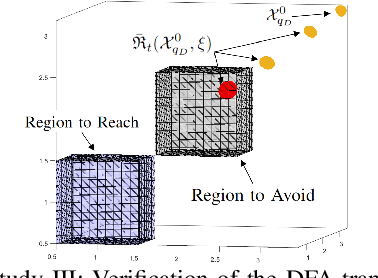
This paper presents a new approach to design verified compositions of Neural Network (NN) controllers for autonomous systems with tasks captured by Linear Temporal Logic (LTL) formulas. Particularly, the LTL formula requires the system to reach and avoid certain regions in a temporal/logical order. We assume that the system is equipped with a finite set of trained NN controllers. Each controller has been trained so that it can drive the system towards a specific region of interest while avoiding others. Our goal is to check if there exists a temporal composition of the trained NN controllers - and if so, to compute it - that will yield composite system behaviors that satisfy a user-specified LTL task for any initial system state belonging to a given set. To address this problem, we propose a new approach that relies on a novel integration of automata theory and recently proposed reachability analysis tools for NN-controlled systems. We note that the proposed method can be applied to other controllers, not necessarily modeled by NNs, by appropriate selection of the reachability analysis tool. We focus on NN controllers due to their lack of robustness. The proposed method is demonstrated on navigation tasks for aerial vehicles.