 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Task Network Pruning and Embedded Optimization for Real-time Deployment in ADAS
Jan 19, 2021
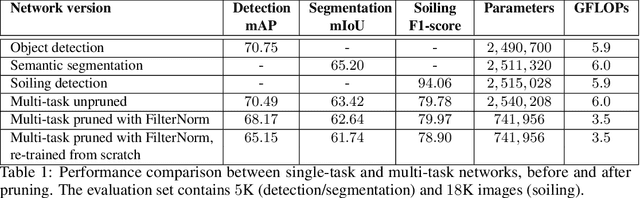
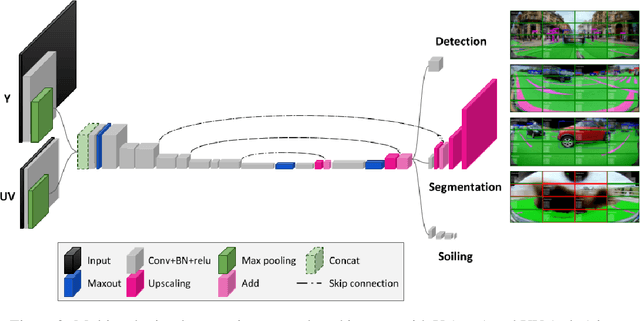
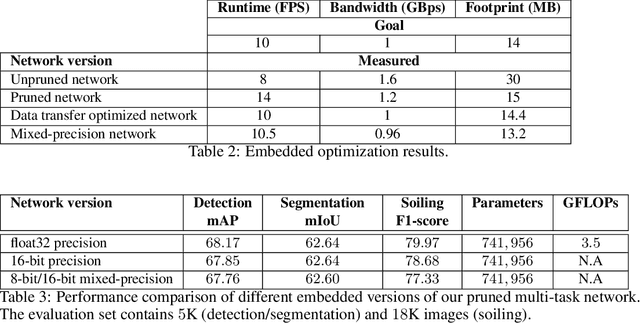
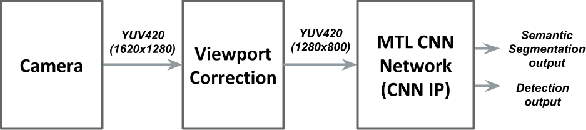
Camera-based Deep Learning algorithms are increasingly needed for perception in Automated Driving systems. However, constraints from the automotive industry challenge the deployment of CNNs by imposing embedded systems with limited computational resources. In this paper, we propose an approach to embed a multi-task CNN network under such conditions on a commercial prototype platform, i.e. a low power System on Chip (SoC) processing four surround-view fisheye cameras at 10 FPS. The first focus is on designing an efficient and compact multi-task network architecture. Secondly, a pruning method is applied to compress the CNN, helping to reduce the runtime and memory usage by a factor of 2 without lowering the performances significantly. Finally, several embedded optimization techniques such as mixed-quantization format usage and efficient data transfers between different memory areas are proposed to ensure real-time execution and avoid bandwidth bottlenecks. The approach is evaluated on the hardware platform, considering embedded detection performances, runtime and memory bandwidth. Unlike most works from the literature that focus on classification task, we aim here to study the effect of pruning and quantization on a compact multi-task network with object detection, semantic segmentation and soiling detection tasks.
YUVMultiNet: Real-time YUV multi-task CNN for autonomous driving
Apr 11, 2019

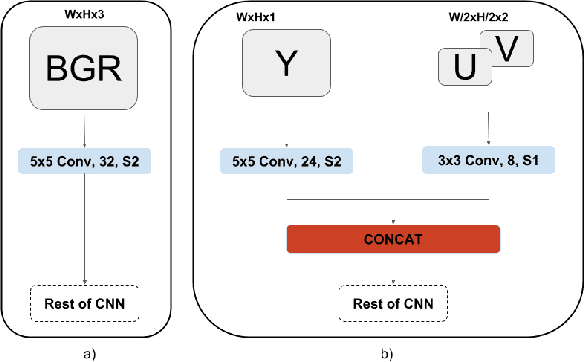
In this paper, we propose a multi-task convolutional neural network (CNN) architecture optimized for a low power automotive grade SoC. We introduce a network based on a unified architecture where the encoder is shared among the two tasks namely detection and segmentation. The pro-posed network runs at 25FPS for 1280x800 resolution. We briefly discuss the methods used to optimize the network architecture such as using native YUV image directly, optimization of layers & feature maps and applying quantization. We also focus on memory bandwidth in our design as convolutions are data intensives and most SOCs are bandwidth bottlenecked. We then demonstrate the efficiency of our proposed network for a dedicated CNN accelerators presenting the key performance indicators (KPI) for the detection and segmentation tasks obtained from the hardware execution and the corresponding run-time.