 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Implementation and Simulation of a Cloud Computing System for Enhancing Real-time Video Services by using VANET and Onboard Navigation Systems
Nov 25, 2014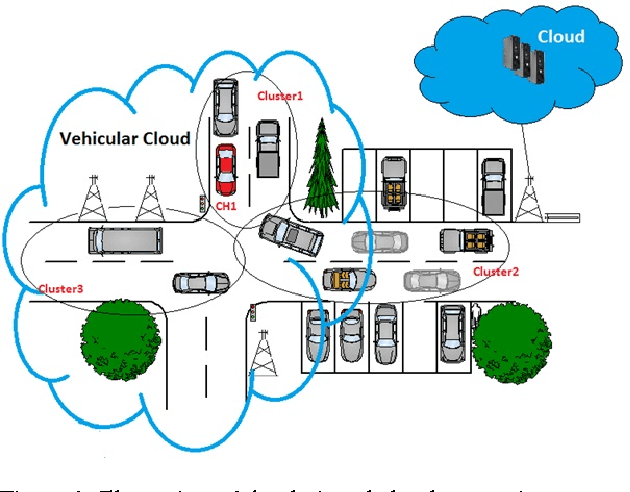

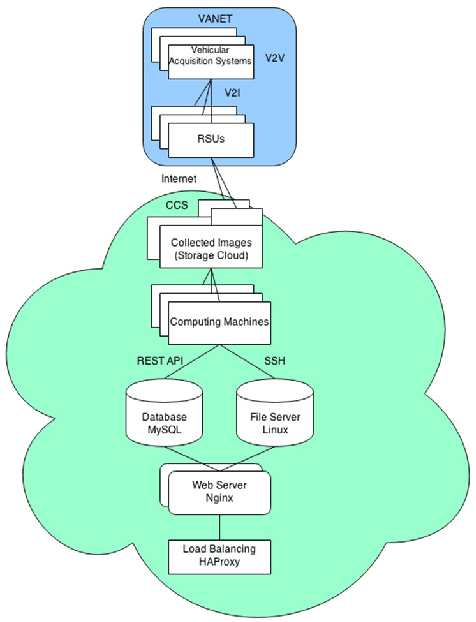
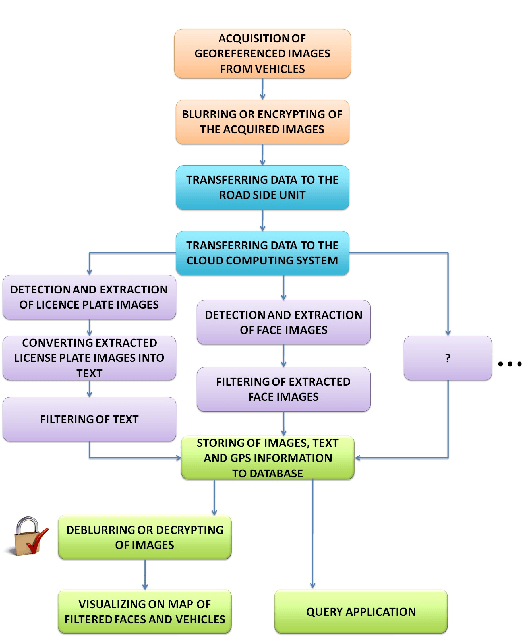
In this paper, we propose a design for novel and experimental cloud computing systems. The proposed system aims at enhancing computational, communicational and annalistic capabilities of road navigation services by merging several independent technologies, namely vision-based embedded navigation systems, prominent Cloud Computing Systems (CCSs) and Vehicular Ad-hoc NETwork (VANET). This work presents our initial investigations by describing the design of a global generic system. The designed system has been experimented with various scenarios of video-based road services. Moreover, the associated architecture has been implemented on a small-scale simulator of an in-vehicle embedded system. The implemented architecture has been experimented in the case of a simulated road service to aid the police agency. The goal of this service is to recognize and track searched individuals and vehicles in a real-time monitoring system remotely connected to moving cars. The presented work demonstrates the potential of our system for efficiently enhancing and diversifying real-time video services in road environments.