 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast PET Scan Tumor Segmentation using Superpixels, Principal Component Analysis and K-means Clustering
Oct 18, 2017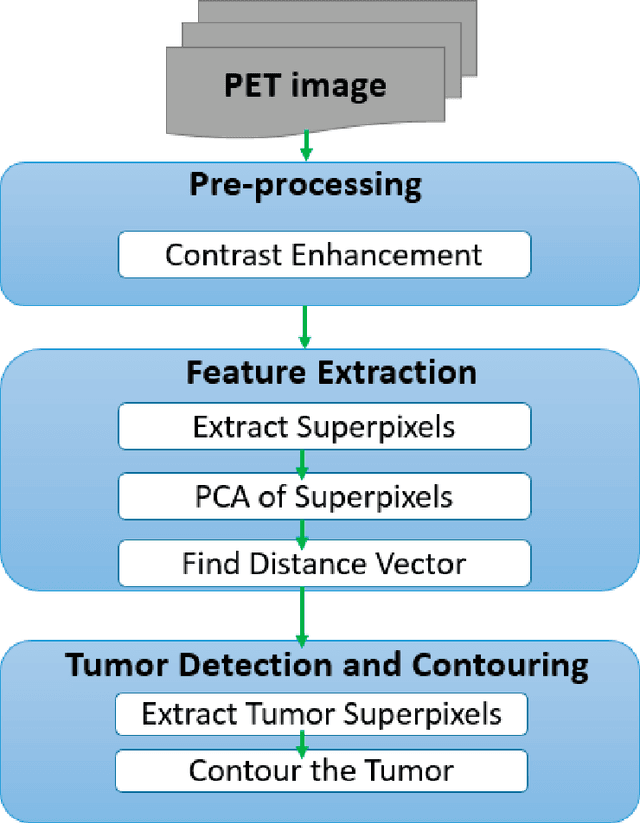

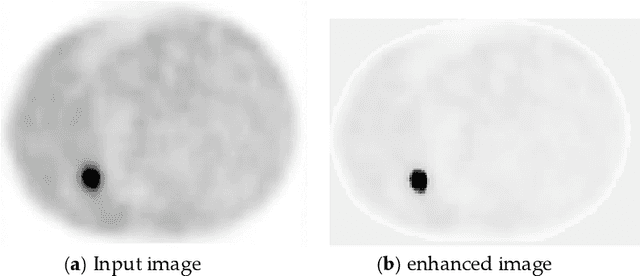
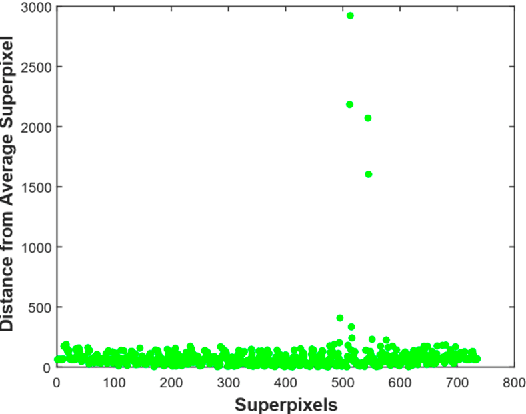
Positron Emission Tomography scan images are extensively used in radiotherapy planning, clinical diagnosis, assessment of growth and treatment of a tumor. These all rely on fidelity and speed of detection and delineation algorithm. Despite intensive research, segmentation remained a challenging problem due to the diverse image content, resolution, shape, and noise. This paper presents a fast positron emission tomography tumor segmentation method in which superpixels are extracted first from the input image. Principal component analysis is then applied on the superpixels and also on their average. Distance vector of each superpixel from the average is computed in principal components coordinate system. Finally, k-means clustering is applied on distance vector to recognize tumor and non-tumor superpixels. The proposed approach is implemented in MATLAB 2016 which resulted in an average Dice similarity of 84.2% on the dataset. Additionally, a very fast execution time was achieved as the number of superpixels and the size of distance vector on which clustering was done was very small compared to the number of raw pixels in dataset images.
Smoothness-based Edge Detection using Low-SNR Camera for Robot Navigation
Oct 03, 2017
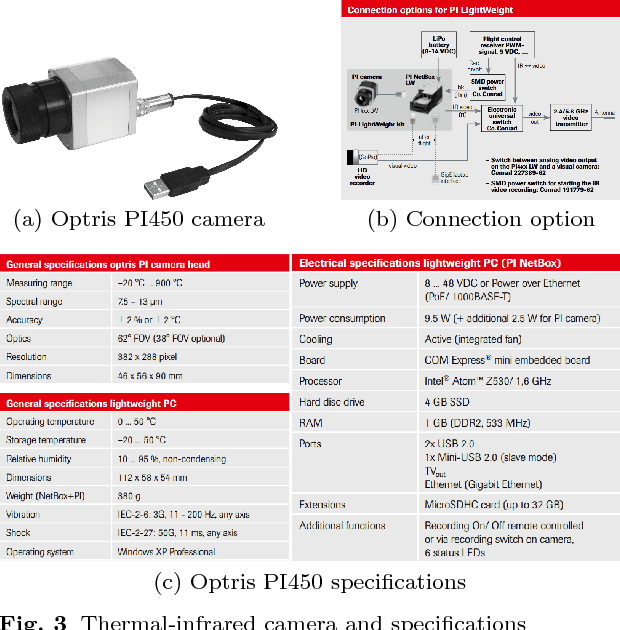
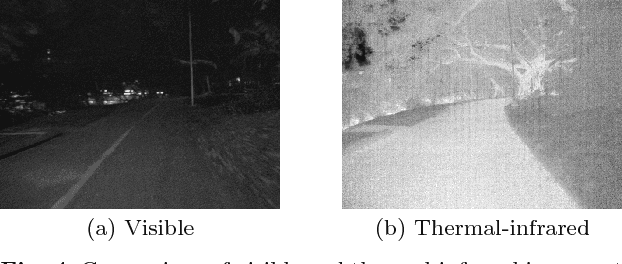
In the emerging advancement in the branch of autonomous robotics, the ability of a robot to efficiently localize and construct maps of its surrounding is crucial. This paper deals with utilizing thermal-infrared cameras, as opposed to conventional cameras as the primary sensor to capture images of the robot's surroundings. For localization, the images need to be further processed before feeding them to a navigational system. The main motivation of this paper was to develop an edge detection methodology capable of utilizing the low-SNR poor output from such a thermal camera and effectively detect smooth edges of the surrounding environment. The enhanced edge detector proposed in this paper takes the raw image from the thermal sensor, denoises the images, applies Canny edge detection followed by CSS method. The edges are ranked to remove any noise and only edges of the highest rank are kept. Then, the broken edges are linked by computing edge metrics and a smooth edge of the surrounding is displayed in a binary image. Several comparisons are also made in the paper between the proposed technique and the existing techniques.