 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe influence of labeling techniques in classifying human manipulation movement of different speed
Feb 04, 2022



In this work, we investigate the influence of labeling methods on the classification of human movements on data recorded using a marker-based motion capture system. The dataset is labeled using two different approaches, one based on video data of the movements, the other based on the movement trajectories recorded using the motion capture system. The dataset is labeled using two different approaches, one based on video data of the movements, the other based on the movement trajectories recorded using the motion capture system. The data was recorded from one participant performing a stacking scenario comprising simple arm movements at three different speeds (slow, normal, fast). Machine learning algorithms that include k-Nearest Neighbor, Random Forest, Extreme Gradient Boosting classifier, Convolutional Neural networks (CNN), Long Short-Term Memory networks (LSTM), and a combination of CNN-LSTM networks are compared on their performance in recognition of these arm movements. The models were trained on actions performed on slow and normal speed movements segments and generalized on actions consisting of fast-paced human movement. It was observed that all the models trained on normal-paced data labeled using trajectories have almost 20% improvement in accuracy on test data in comparison to the models trained on data labeled using videos of the performed experiments.
Multi-Modal Depth Estimation Using Convolutional Neural Networks
Dec 17, 2020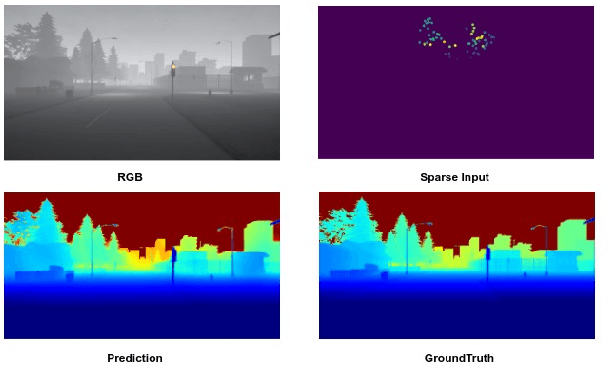
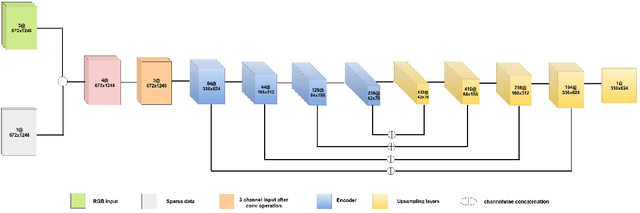
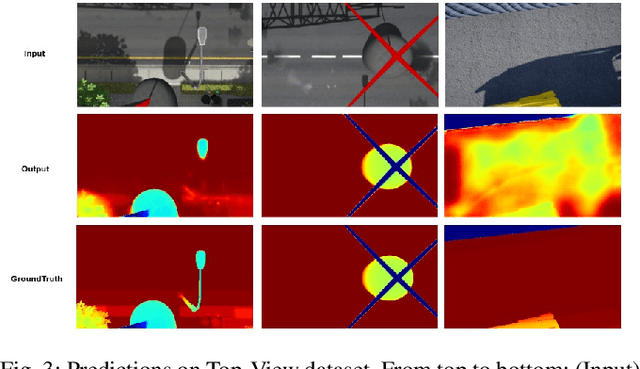
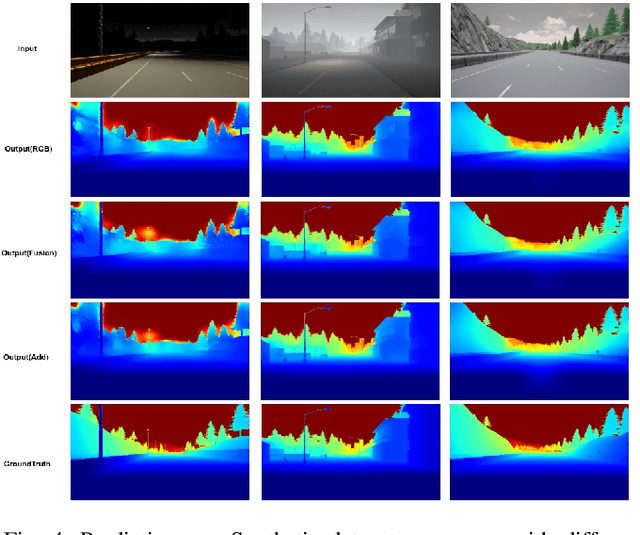
This paper addresses the problem of dense depth predictions from sparse distance sensor data and a single camera image on challenging weather conditions. This work explores the significance of different sensor modalities such as camera, Radar, and Lidar for estimating depth by applying Deep Learning approaches. Although Lidar has higher depth-sensing abilities than Radar and has been integrated with camera images in lots of previous works, depth estimation using CNN's on the fusion of robust Radar distance data and camera images has not been explored much. In this work, a deep regression network is proposed utilizing a transfer learning approach consisting of an encoder where a high performing pre-trained model has been used to initialize it for extracting dense features and a decoder for upsampling and predicting desired depth. The results are demonstrated on Nuscenes, KITTI, and a Synthetic dataset which was created using the CARLA simulator. Also, top-view zoom-camera images captured from the crane on a construction site are evaluated to estimate the distance of the crane boom carrying heavy loads from the ground to show the usability in safety-critical applications.