 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTool-Aided Evolutionary LLM for Generative Policy Toward Efficient Resource Management in Wireless Federated Learning
May 16, 2025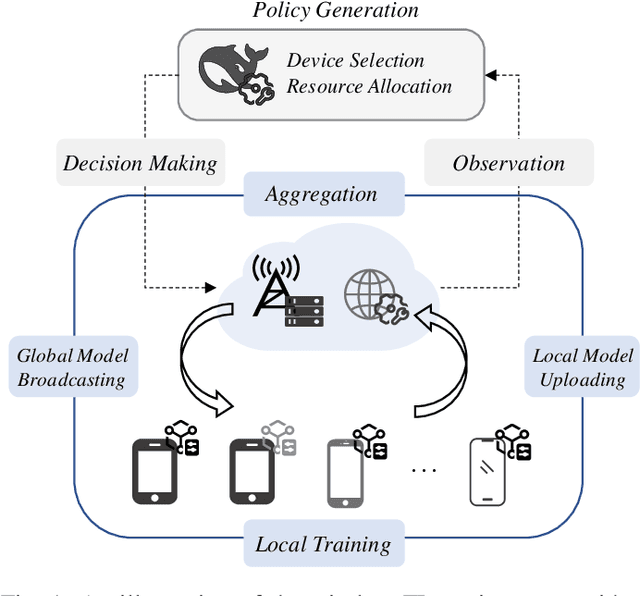
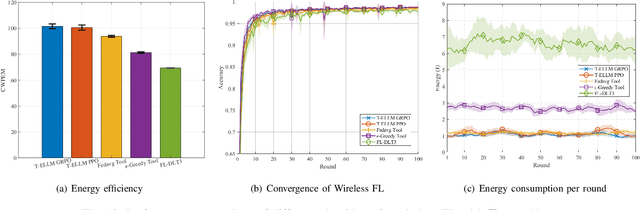
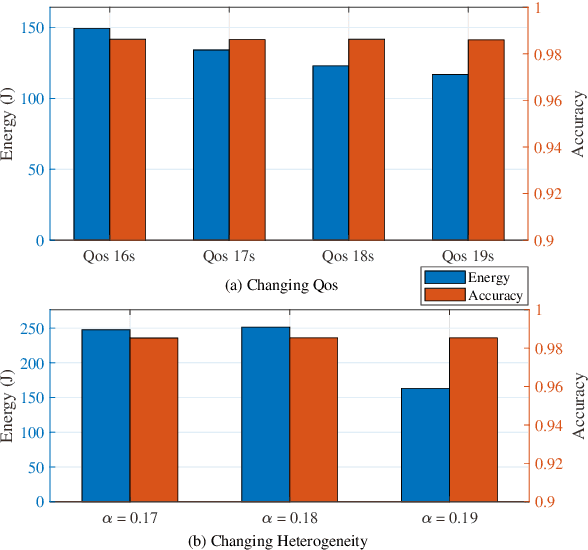
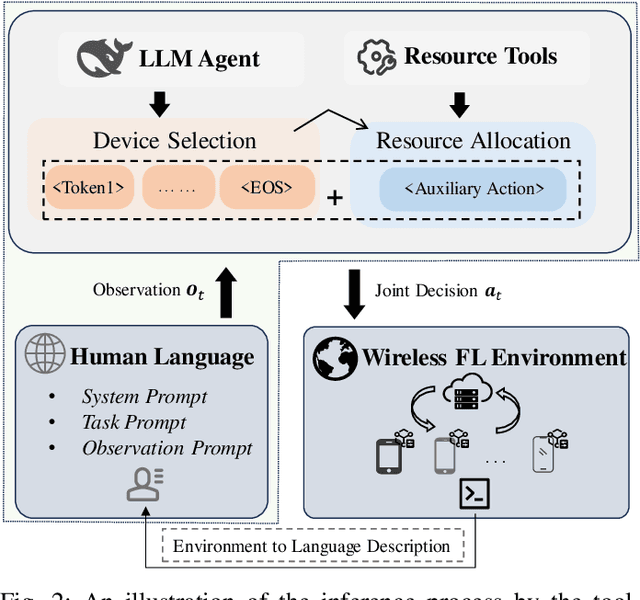
Federated Learning (FL) enables distributed model training across edge devices in a privacy-friendly manner. However, its efficiency heavily depends on effective device selection and high-dimensional resource allocation in dynamic and heterogeneous wireless environments. Conventional methods demand a confluence of domain-specific expertise, extensive hyperparameter tuning, and/or heavy interaction cost. This paper proposes a Tool-aided Evolutionary Large Language Model (T-ELLM) framework to generate a qualified policy for device selection in a wireless FL environment. Unlike conventional optimization methods, T-ELLM leverages natural language-based scenario prompts to enhance generalization across varying network conditions. The framework decouples the joint optimization problem mathematically, enabling tractable learning of device selection policies while delegating resource allocation to convex optimization tools. To improve adaptability, T-ELLM integrates a sample-efficient, model-based virtual learning environment that captures the relationship between device selection and learning performance, facilitating subsequent group relative policy optimization. This concerted approach reduces reliance on real-world interactions, minimizing communication overhead while maintaining high-fidelity decision-making. Theoretical analysis proves that the discrepancy between virtual and real environments is bounded, ensuring the advantage function learned in the virtual environment maintains a provably small deviation from real-world conditions. Experimental results demonstrate that T-ELLM outperforms benchmark methods in energy efficiency and exhibits robust adaptability to environmental changes.
Multi-Agent Probabilistic Ensembles with Trajectory Sampling for Connected Autonomous Vehicles
Dec 21, 2023Autonomous Vehicles (AVs) have attracted significant attention in recent years and Reinforcement Learning (RL) has shown remarkable performance in improving the autonomy of vehicles. In that regard, the widely adopted Model-Free RL (MFRL) promises to solve decision-making tasks in connected AVs (CAVs), contingent on the readiness of a significant amount of data samples for training. Nevertheless, it might be infeasible in practice and possibly lead to learning instability. In contrast, Model-Based RL (MBRL) manifests itself in sample-efficient learning, but the asymptotic performance of MBRL might lag behind the state-of-the-art MFRL algorithms. Furthermore, most studies for CAVs are limited to the decision-making of a single AV only, thus underscoring the performance due to the absence of communications. In this study, we try to address the decision-making problem of multiple CAVs with limited communications and propose a decentralized Multi-Agent Probabilistic Ensembles with Trajectory Sampling algorithm MA-PETS. In particular, in order to better capture the uncertainty of the unknown environment, MA-PETS leverages Probabilistic Ensemble (PE) neural networks to learn from communicated samples among neighboring CAVs. Afterwards, MA-PETS capably develops Trajectory Sampling (TS)-based model-predictive control for decision-making. On this basis, we derive the multi-agent group regret bound affected by the number of agents within the communication range and mathematically validate that incorporating effective information exchange among agents into the multi-agent learning scheme contributes to reducing the group regret bound in the worst case. Finally, we empirically demonstrate the superiority of MA-PETS in terms of the sample efficiency comparable to MFBL.