 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Regrasping Efficiency Using Prior Grasping Perceptions with Soft Fingertips
Mar 14, 2025Grasping the same object in different postures is often necessary, especially when handling tools or stacked items. Due to unknown object properties and changes in grasping posture, the required grasping force is uncertain and variable. Traditional methods rely on real-time feedback to control the grasping force cautiously, aiming to prevent slipping or damage. However, they overlook reusable information from the initial grasp, treating subsequent regrasping attempts as if they were the first, which significantly reduces efficiency. To improve this, we propose a method that utilizes perception from prior grasping attempts to predict the required grasping force, even with changes in position. We also introduce a calculation method that accounts for fingertip softness and object asymmetry. Theoretical analyses demonstrate the feasibility of predicting grasping forces across various postures after a single grasp. Experimental verifications attest to the accuracy and adaptability of our prediction method. Furthermore, results show that incorporating the predicted grasping force into feedback-based approaches significantly enhances grasping efficiency across a range of everyday objects.
An Adaptive Grasping Force Tracking Strategy for Nonlinear and Time-Varying Object Behaviors
Dec 03, 2024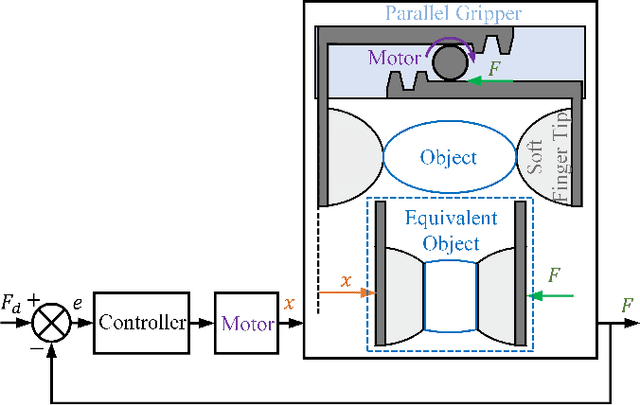

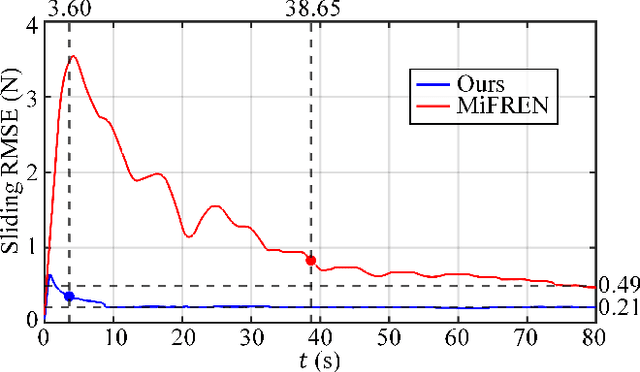

Accurate grasp force control is one of the key skills for ensuring successful and damage-free robotic grasping of objects. Although existing methods have conducted in-depth research on slip detection and grasping force planning, they often overlook the issue of adaptive tracking of the actual force to the target force when handling objects with different material properties. The optimal parameters of a force tracking controller are significantly influenced by the object's stiffness, and many adaptive force tracking algorithms rely on stiffness estimation. However, real-world objects often exhibit viscous, plastic, or other more complex nonlinear time-varying behaviors, and existing studies provide insufficient support for these materials in terms of stiffness definition and estimation. To address this, this paper introduces the concept of generalized stiffness, extending the definition of stiffness to nonlinear time-varying grasp system models, and proposes an online generalized stiffness estimator based on Long Short-Term Memory (LSTM) networks. Based on generalized stiffness, this paper proposes an adaptive parameter adjustment strategy using a PI controller as an example, enabling dynamic force tracking for objects with varying characteristics. Experimental results demonstrate that the proposed method achieves high precision and short probing time, while showing better adaptability to non-ideal objects compared to existing methods. The method effectively solves the problem of grasp force tracking in unknown, nonlinear, and time-varying grasp systems, enhancing the robotic grasping ability in unstructured environments.