 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Learning-based Solver Comparable to Metaheuristics for the Capacitated Arc Routing Problem
Mar 11, 2024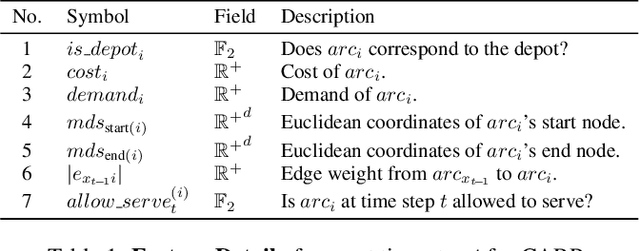

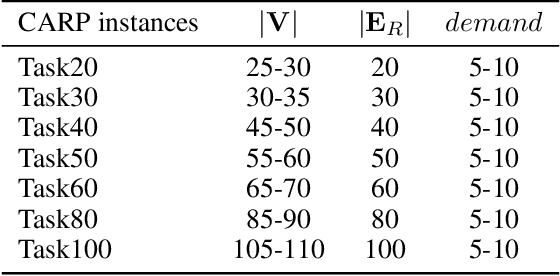

Recently, neural networks (NN) have made great strides in combinatorial optimization. However, they face challenges when solving the capacitated arc routing problem (CARP) which is to find the minimum-cost tour covering all required edges on a graph, while within capacity constraints. In tackling CARP, NN-based approaches tend to lag behind advanced metaheuristics, since they lack directed arc modeling and efficient learning methods tailored for complex CARP. In this paper, we introduce an NN-based solver to significantly narrow the gap with advanced metaheuristics while exhibiting superior efficiency. First, we propose the direction-aware attention model (DaAM) to incorporate directionality into the embedding process, facilitating more effective one-stage decision-making. Second, we design a supervised reinforcement learning scheme that involves supervised pre-training to establish a robust initial policy for subsequent reinforcement fine-tuning. It proves particularly valuable for solving CARP that has a higher complexity than the node routing problems (NRPs). Finally, a path optimization method is proposed to adjust the depot return positions within the path generated by DaAM. Experiments illustrate that our approach surpasses heuristics and achieves decision quality comparable to state-of-the-art metaheuristics for the first time while maintaining superior efficiency.
Balanced Line Coverage in Large-scale Urban Scene
Feb 22, 2023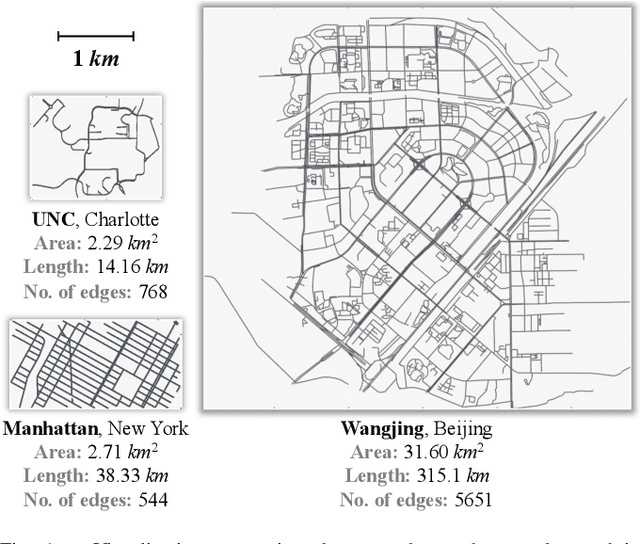
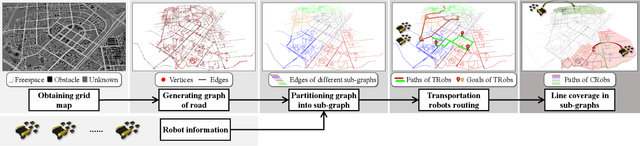
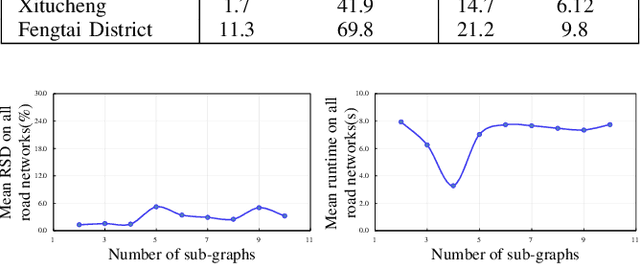
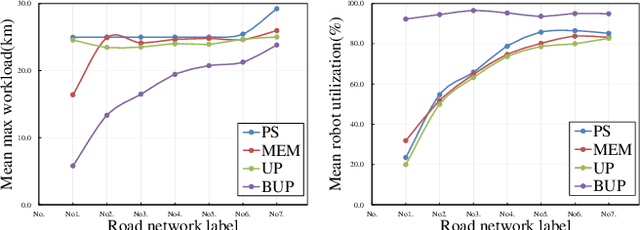
Line coverage is to cover linear infrastructure modeled as 1D segments by robots, which received attention in recent years. With the increasing urbanization, the area of the city and the density of infrastructure continues to increase, which brings two issues: (1) Due to the energy constraint, it is hard for the homogeneous robot team to cover the large-scale linear infrastructure starting from one depot; (2) In the large urban scene, the imbalance of robots' path greatly extends the time cost of the multi-robot system, which is more serious than that in smaller-size scenes. To address these issues, we propose a heterogeneous multi-robot approach consisting of several teams, each of which contains one transportation robot (TRob) and several coverage robots (CRobs). Firstly, a balanced graph partitioning (BGP) algorithm is proposed to divide the road network into several similar-size sub-graphs, and then the TRob delivers a group of CRobs to the subgraph region quickly. Secondly, a balanced ulusoy partitioning (BUP) algorithm is proposed to extract similar-length tours for each CRob from the sub-graph. Abundant experiments are conducted on seven road networks ranging in scales that are collected in this paper. Our method achieves robot utilization of 90% and the best maximal tour length at the cost of a small increase in total tour length, which further minimizes the time cost of the whole system. The source code and the road networks are available at https://github.com/suhangsong/BLC-LargeScale.