 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriver2vec: Driver Identification from Automotive Data
Feb 10, 2021
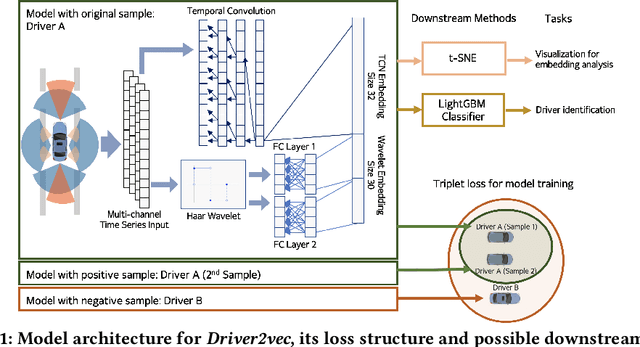
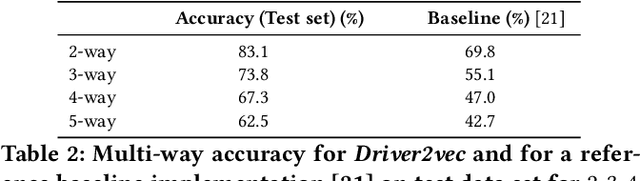
With increasing focus on privacy protection, alternative methods to identify vehicle operator without the use of biometric identifiers have gained traction for automotive data analysis. The wide variety of sensors installed on modern vehicles enable autonomous driving, reduce accidents and improve vehicle handling. On the other hand, the data these sensors collect reflect drivers' habit. Drivers' use of turn indicators, following distance, rate of acceleration, etc. can be transformed to an embedding that is representative of their behavior and identity. In this paper, we develop a deep learning architecture (Driver2vec) to map a short interval of driving data into an embedding space that represents the driver's behavior to assist in driver identification. We develop a custom model that leverages performance gains of temporal convolutional networks, embedding separation power of triplet loss and classification accuracy of gradient boosting decision trees. Trained on a dataset of 51 drivers provided by Nervtech, Driver2vec is able to accurately identify the driver from a short 10-second interval of sensor data, achieving an average pairwise driver identification accuracy of 83.1% from this 10-second interval, which is remarkably higher than performance obtained in previous studies. We then analyzed performance of Driver2vec to show that its performance is consistent across scenarios and that modeling choices are sound.