 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Speaker Independence: Evaluating Cross-Lingual Acoustic-to-Articulatory Inversion Across Finnish and Russian
Jun 18, 2026Acoustic-to-articulatory inversion (AAI) remains challenging under domain shifts where changes in speaker attributes and cross-language conditions often degrade performance. We conduct a systematic evaluation under such shifts and establish baseline benchmarks on FROST-EMA, a Finnish-Russian bilingual EMA corpus. FROST-EMA addresses the English bias and limited speaker diversity of existing resources. We benchmark (i) articulatory targets (raw EMA coordinates vs tract variables), (ii) acoustic front-ends (MFCC vs SSL features), and (iii) inversion back-ends (BiLSTM vs a lightweight attention-based sequence model). We further define evaluation protocols for cross-gender transfer (within language) and cross-language transfer (within gender). The results indicate that cross-gender mismatch introduces moderate Pearson correlation declines (approximately 0.05 to 0.10) relative to the in-domain baseline, whereas cross-language mismatch causes larger drops (approximately 0.10 to 0.20).
Learning Input-Channel Permutation Equivariance for Multi-Channel Source Separation: Reducing Bleeding in Small Music Ensembles
Jun 15, 2026Microphone bleed is a persistent challenge in small ensembles and orchestral recordings, where close microphones intended for individual instruments also capture leakage from nearby sources. This overlap degrades track isolation and complicates mixing. This paper addresses the bleeding problem by making channel-permutation-equivariance a core learning principle. During training, we apply the same random permutation to the input microphone channels and their corresponding reference targets. This discourages reliance on fixed channel-instrument associations and improves robustness to changes in the recording setup and even in the recorded instruments. The proposed model is trained on synthetic ensembles with diverse simulated room acoustics and microphone placements, and evaluated on unseen simulated conditions and real URMP recordings. The results show that permutation-aware training consistently improves SDR and reduces bleeding under unseen conditions compared with non-permutation baselines. The findings highlight permutation-equivariance as a simple, data-centric strategy for robust debleeding and practical multi-channel source separation in music production workflows.
WST-X Series: Wavelet Scattering Transform for Interpretable Speech Deepfake Detection
Feb 03, 2026Designing front-ends for speech deepfake detectors primarily focuses on two categories. Hand-crafted filterbank features are transparent but are limited in capturing high-level semantic details, often resulting in performance gaps compared to self-supervised (SSL) features. SSL features, in turn, lack interpretability and may overlook fine-grained spectral anomalies. We propose the WST-X series, a novel family of feature extractors that combines the best of both worlds via the wavelet scattering transform (WST), integrating wavelets with nonlinearities analogous to deep convolutional networks. We investigate 1D and 2D WSTs to extract acoustic details and higher-order structural anomalies, respectively. Experimental results on the recent and challenging Deepfake-Eval-2024 dataset indicate that WST-X outperforms existing front-ends by a wide margin. Our analysis reveals that a small averaging scale ($J$), combined with high-frequency and directional resolutions ($Q, L$), is critical for capturing subtle artifacts. This underscores the value of translation-invariant and deformation-stable features for robust and interpretable speech deepfake detection.
Class-Incremental Learning for Sound Event Localization and Detection
Nov 19, 2024This paper investigates the feasibility of class-incremental learning (CIL) for Sound Event Localization and Detection (SELD) tasks. The method features an incremental learner that can learn new sound classes independently while preserving knowledge of old classes. The continual learning is achieved through a mean square error-based distillation loss to minimize output discrepancies between subsequent learners. The experiments are conducted on the TAU-NIGENS Spatial Sound Events 2021 dataset, which includes 12 different sound classes and demonstrate the efficacy of proposed method. We begin by learning 8 classes and introduce the 4 new classes at next stage. After the incremental phase, the system is evaluated on the full set of learned classes. Results show that, for this realistic dataset, our proposed method successfully maintains baseline performance across all metrics.
IR-UWB Radar-based Situational Awareness System for Smartphone-Distracted Pedestrians
Nov 02, 2023



With the widespread adoption of smartphones, ensuring pedestrian safety on roads has become a critical concern due to smartphone distraction. This paper proposes a novel and real-time assistance system called UWB-assisted Safe Walk (UASW) for obstacle detection and warns users about real-time situations. The proposed method leverages Impulse Radio Ultra-Wideband (IR-UWB) radar embedded in the smartphone, which provides excellent range resolution and high noise resilience using short pulses. We implemented UASW specifically for Android smartphones with IR-UWB connectivity. The framework uses complex Channel Impulse Response (CIR) data to integrate rule-based obstacle detection with artificial neural network (ANN) based obstacle classification. The performance of the proposed UASW system is analyzed using real-time collected data. The results show that the proposed system achieves an obstacle detection accuracy of up to 97% and obstacle classification accuracy of up to 95% with an inference delay of 26.8 ms. The results highlight the effectiveness of UASW in assisting smartphone-distracted pedestrians and improving their situational awareness.
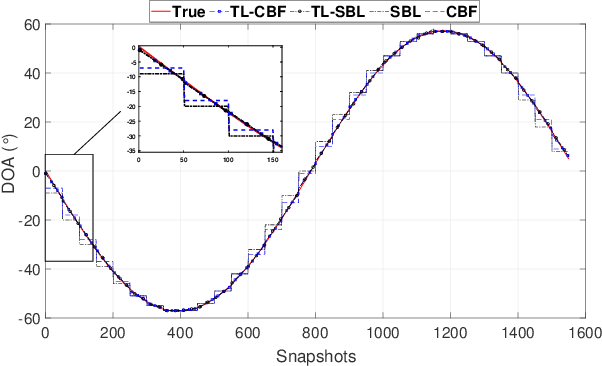
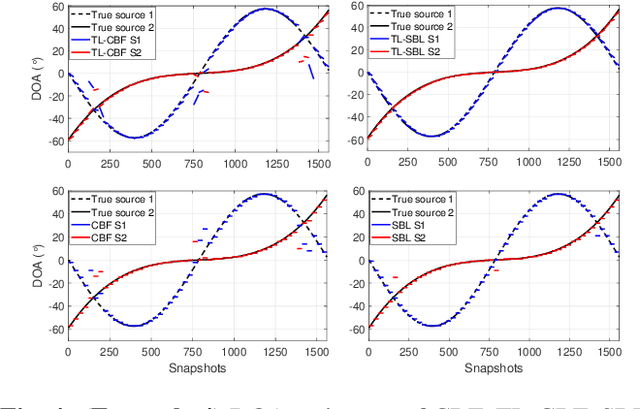
Localization of DOA trajectories -- Beyond the grid
Aug 14, 2023The direction of arrival (DOA) estimation algorithms are crucial in localizing acoustic sources. Traditional localization methods rely on block-level processing to extract the directional information from multiple measurements processed together. However, these methods assume that DOA remains constant throughout the block, which may not be true in practical scenarios. Also, the performance of localization methods is limited when the true parameters do not lie on the parameter search grid. In this paper we propose two trajectory models, namely the polynomial and bandlimited trajectory models, to capture the DOA dynamics. To estimate trajectory parameters, we adopt two gridless algorithms: i) Sliding Frank-Wolfe (SFW), which solves the Beurling LASSO problem and ii) Newtonized Orthogonal Matching Pursuit (NOMP), which improves over OMP using cyclic refinement. Furthermore, we extend our analysis to include wideband processing. The simulation results indicate that the proposed trajectory localization algorithms exhibit improved performance compared to grid-based methods in terms of resolution, robustness to noise, and computational efficiency.
Improving trajectory localization accuracy via direction-of-arrival derivative estimation
Dec 10, 2022Sound source localization is crucial in acoustic sensing and monitoring-related applications. In this paper, we do a comprehensive analysis of improvement in sound source localization by combining the direction of arrivals (DOAs) with their derivatives which quantify the changes in the positions of sources over time. This study uses the SALSA-Lite feature with a convolutional recurrent neural network (CRNN) model for predicting DOAs and their first-order derivatives. An update rule is introduced to combine the predicted DOAs with the estimated derivatives to obtain the final DOAs. The experimental validation is done using TAU-NIGENS Spatial Sound Events (TNSSE) 2021 dataset. We compare the performance of the networks predicting DOAs with derivative vs. the one predicting only the DOAs at low SNR levels. The results show that combining the derivatives with the DOAs improves the localization accuracy of moving sources.
Parametric Models for DOA Trajectory Localization
Apr 20, 2022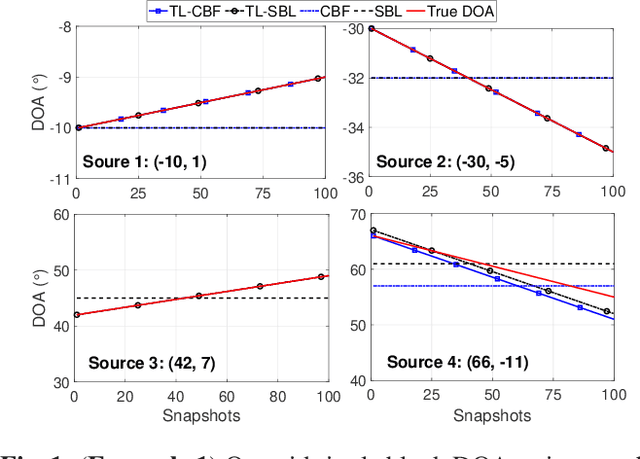
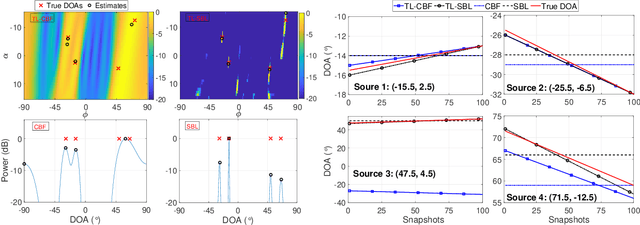
Directions of arrival (DOA) estimation or localization of sources is an important problem in many applications for which numerous algorithms have been proposed. Most localization methods use block-level processing that combines multiple data snapshots to estimate DOA within a block. The DOAs are assumed to be constant within the block duration. However, these assumptions are often violated due to source motion. In this paper, we propose a signal model that captures the linear variations in DOA within a block. We applied conventional beamforming (CBF) algorithm to this model to estimate linear DOA trajectories. Further, we formulate the proposed signal model as a block sparse model and subsequently derive sparse Bayesian learning (SBL) algorithm. Our simulation results show that this linear parametric DOA model and corresponding algorithms capture the DOA trajectories for moving sources more accurately than traditional signal models and methods.
Deep Learning For Computer Vision Tasks: A review
Apr 11, 2018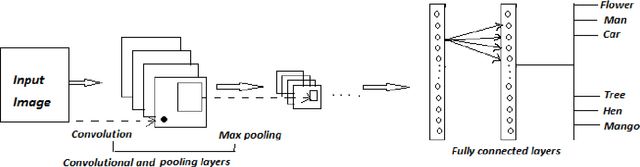
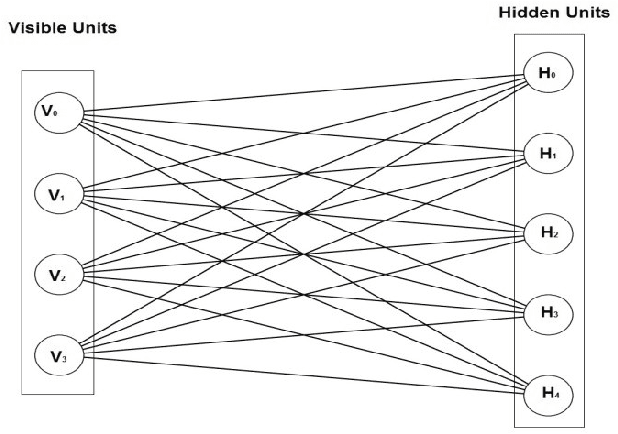
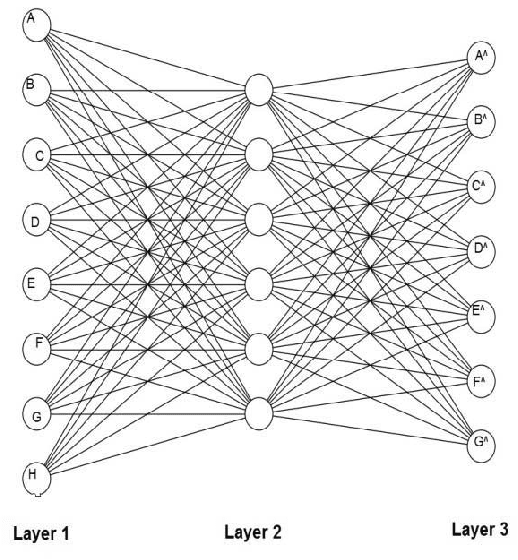
Deep learning has recently become one of the most popular sub-fields of machine learning owing to its distributed data representation with multiple levels of abstraction. A diverse range of deep learning algorithms are being employed to solve conventional artificial intelligence problems. This paper gives an overview of some of the most widely used deep learning algorithms applied in the field of computer vision. It first inspects the various approaches of deep learning algorithms, followed by a description of their applications in image classification, object identification, image extraction and semantic segmentation in the presence of noise. The paper concludes with the discussion of the future scope and challenges for construction and training of deep neural networks.