 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Object Rearrangement in Constrained Environments with Heterogeneous Graph Neural Networks
Sep 27, 2023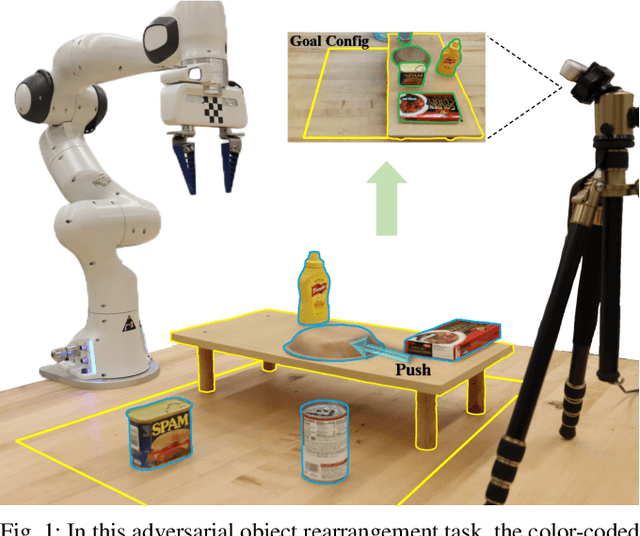
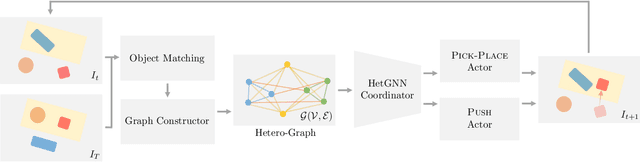
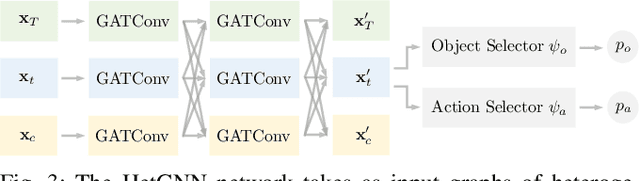

Adversarial object rearrangement in the real world (e.g., previously unseen or oversized items in kitchens and stores) could benefit from understanding task scenes, which inherently entail heterogeneous components such as current objects, goal objects, and environmental constraints. The semantic relationships among these components are distinct from each other and crucial for multi-skilled robots to perform efficiently in everyday scenarios. We propose a hierarchical robotic manipulation system that learns the underlying relationships and maximizes the collaborative power of its diverse skills (e.g., pick-place, push) for rearranging adversarial objects in constrained environments. The high-level coordinator employs a heterogeneous graph neural network (HetGNN), which reasons about the current objects, goal objects, and environmental constraints; the low-level 3D Convolutional Neural Network-based actors execute the action primitives. Our approach is trained entirely in simulation, and achieved an average success rate of 87.88% and a planning cost of 12.82 in real-world experiments, surpassing all baseline methods. Supplementary material is available at https://sites.google.com/umn.edu/versatile-rearrangement.