 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI GPT-5 System Card
Dec 19, 2025This is the system card published alongside the OpenAI GPT-5 launch, August 2025. GPT-5 is a unified system with a smart and fast model that answers most questions, a deeper reasoning model for harder problems, and a real-time router that quickly decides which model to use based on conversation type, complexity, tool needs, and explicit intent (for example, if you say 'think hard about this' in the prompt). The router is continuously trained on real signals, including when users switch models, preference rates for responses, and measured correctness, improving over time. Once usage limits are reached, a mini version of each model handles remaining queries. This system card focuses primarily on gpt-5-thinking and gpt-5-main, while evaluations for other models are available in the appendix. The GPT-5 system not only outperforms previous models on benchmarks and answers questions more quickly, but -- more importantly -- is more useful for real-world queries. We've made significant advances in reducing hallucinations, improving instruction following, and minimizing sycophancy, and have leveled up GPT-5's performance in three of ChatGPT's most common uses: writing, coding, and health. All of the GPT-5 models additionally feature safe-completions, our latest approach to safety training to prevent disallowed content. Similarly to ChatGPT agent, we have decided to treat gpt-5-thinking as High capability in the Biological and Chemical domain under our Preparedness Framework, activating the associated safeguards. While we do not have definitive evidence that this model could meaningfully help a novice to create severe biological harm -- our defined threshold for High capability -- we have chosen to take a precautionary approach.
ELIGN: Expectation Alignment as a Multi-Agent Intrinsic Reward
Oct 09, 2022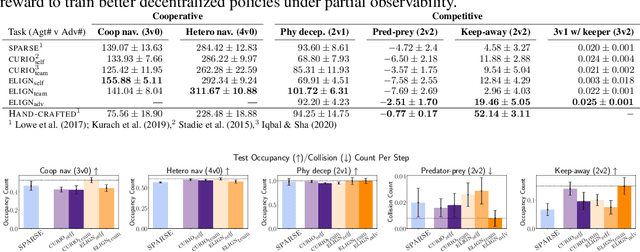
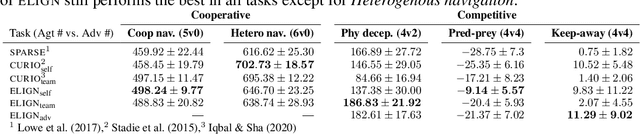
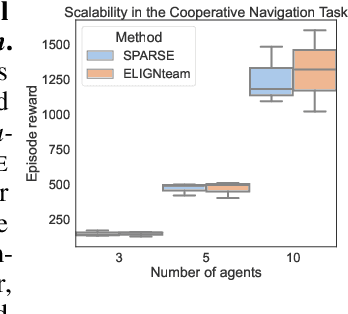

Modern multi-agent reinforcement learning frameworks rely on centralized training and reward shaping to perform well. However, centralized training and dense rewards are not readily available in the real world. Current multi-agent algorithms struggle to learn in the alternative setup of decentralized training or sparse rewards. To address these issues, we propose a self-supervised intrinsic reward ELIGN - expectation alignment - inspired by the self-organization principle in Zoology. Similar to how animals collaborate in a decentralized manner with those in their vicinity, agents trained with expectation alignment learn behaviors that match their neighbors' expectations. This allows the agents to learn collaborative behaviors without any external reward or centralized training. We demonstrate the efficacy of our approach across 6 tasks in the multi-agent particle and the complex Google Research football environments, comparing ELIGN to sparse and curiosity-based intrinsic rewards. When the number of agents increases, ELIGN scales well in all multi-agent tasks except for one where agents have different capabilities. We show that agent coordination improves through expectation alignment because agents learn to divide tasks amongst themselves, break coordination symmetries, and confuse adversaries. These results identify tasks where expectation alignment is a more useful strategy than curiosity-driven exploration for multi-agent coordination, enabling agents to do zero-shot coordination.