 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA comparison of pipelines for the translation of a low resource language based on transformers
Sep 15, 2025This work compares three pipelines for training transformer-based neural networks to produce machine translators for Bambara, a Mand\`e language spoken in Africa by about 14,188,850 people. The first pipeline trains a simple transformer to translate sentences from French into Bambara. The second fine-tunes LLaMA3 (3B-8B) instructor models using decoder-only architectures for French-to-Bambara translation. Models from the first two pipelines were trained with different hyperparameter combinations to improve BLEU and chrF scores, evaluated on both test sentences and official Bambara benchmarks. The third pipeline uses language distillation with a student-teacher dual neural network to integrate Bambara into a pre-trained LaBSE model, which provides language-agnostic embeddings. A BERT extension is then applied to LaBSE to generate translations. All pipelines were tested on Dokotoro (medical) and Bayelemagaba (mixed domains). Results show that the first pipeline, although simpler, achieves the best translation accuracy (10% BLEU, 21% chrF on Bayelemagaba), consistent with low-resource translation results. On the Yiri dataset, created for this work, it achieves 33.81% BLEU and 41% chrF. Instructor-based models perform better on single datasets than on aggregated collections, suggesting they capture dataset-specific patterns more effectively.
Synthesizing Evolving Symbolic Representations for Autonomous Systems
Sep 18, 2024Recently, AI systems have made remarkable progress in various tasks. Deep Reinforcement Learning(DRL) is an effective tool for agents to learn policies in low-level state spaces to solve highly complex tasks. Researchers have introduced Intrinsic Motivation(IM) to the RL mechanism, which simulates the agent's curiosity, encouraging agents to explore interesting areas of the environment. This new feature has proved vital in enabling agents to learn policies without being given specific goals. However, even though DRL intelligence emerges through a sub-symbolic model, there is still a need for a sort of abstraction to understand the knowledge collected by the agent. To this end, the classical planning formalism has been used in recent research to explicitly represent the knowledge an autonomous agent acquires and effectively reach extrinsic goals. Despite classical planning usually presents limited expressive capabilities, PPDDL demonstrated usefulness in reviewing the knowledge gathered by an autonomous system, making explicit causal correlations, and can be exploited to find a plan to reach any state the agent faces during its experience. This work presents a new architecture implementing an open-ended learning system able to synthesize from scratch its experience into a PPDDL representation and update it over time. Without a predefined set of goals and tasks, the system integrates intrinsic motivations to explore the environment in a self-directed way, exploiting the high-level knowledge acquired during its experience. The system explores the environment and iteratively: (a) discover options, (b) explore the environment using options, (c) abstract the knowledge collected and (d) plan. This paper proposes an alternative approach to implementing open-ended learning architectures exploiting low-level and high-level representations to extend its knowledge in a virtuous loop.
Deep Learning tools to support deforestation monitoring in the Ivory Coast using SAR and Optical satellite imagery
Sep 16, 2024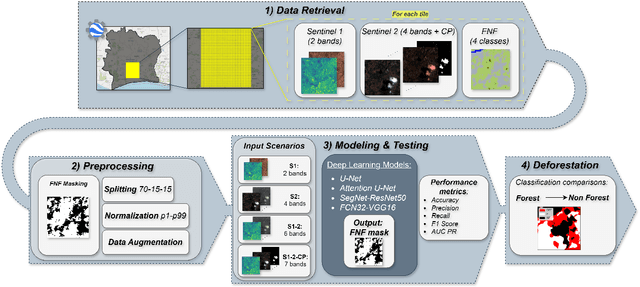

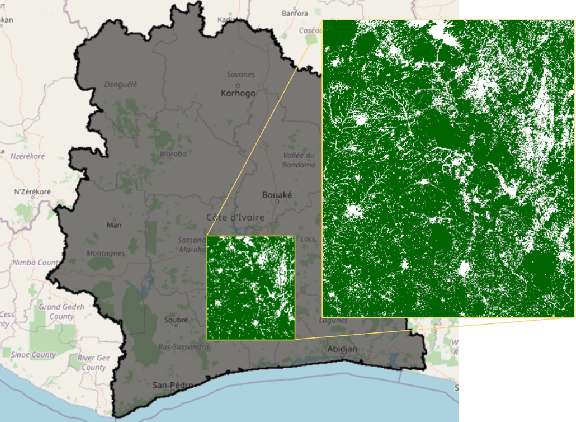

Deforestation is gaining an increasingly importance due to its strong influence on the sorrounding environment, especially in developing countries where population has a disadvantaged economic condition and agriculture is the main source of income. In Ivory Coast, for instance, where the cocoa production is the most remunerative activity, it is not rare to assist to the replacement of portion of ancient forests with new cocoa plantations. In order to monitor this type of deleterious activities, satellites can be employed to recognize the disappearance of the forest to prevent it from expand its area of interest. In this study, Forest-Non-Forest map (FNF) has been used as ground truth for models based on Sentinel images input. State-of-the-art models U-Net, Attention U-Net, Segnet and FCN32 are compared over different years combining Sentinel-1, Sentinel-2 and cloud probability to create forest/non-forest segmentation. Although Ivory Coast lacks of forest coverage datasets and is partially covered by Sentinel images, it is demonstrated the feasibility to create models classifying forest and non-forests pixels over the area using open datasets to predict where deforestation could have occurred. Although a significant portion of the deforestation research is carried out on visible bands, SAR acquisitions are employed to overcome the limits of RGB images over areas often covered by clouds. Finally, the most promising model is employed to estimate the hectares of forest has been cut between 2019 and 2020.