 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementation of Real-Time Lane Detection on Autonomous Mobile Robot
Nov 22, 2024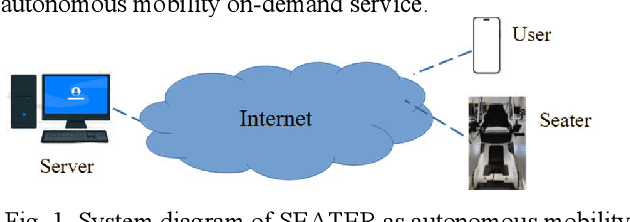
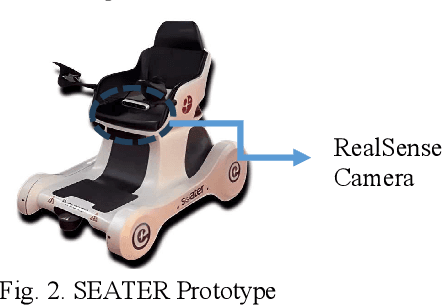

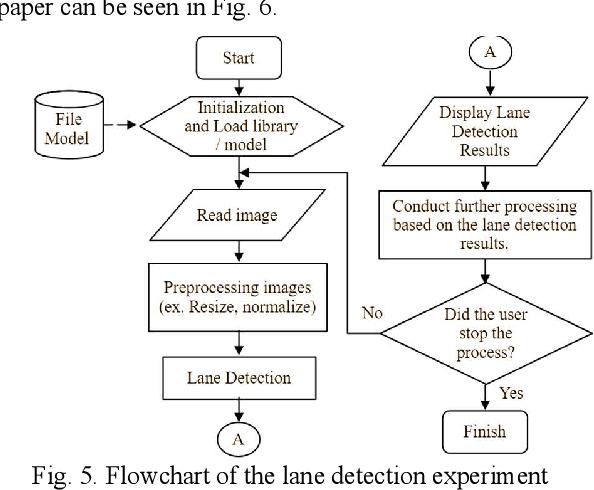
This paper describes the implementation of a learning-based lane detection algorithm on an Autonomous Mobile Robot. It aims to implement the Ultra Fast Lane Detection algorithm for real-time application on the SEATER P2MC-BRIN prototype using a camera and optimize its performance on the Jetson Nano platform. Preliminary experiments were conducted to evaluate the algorithm's performance in terms of data processing speed and accuracy using two types of datasets: outdoor using a public dataset and indoor using an internal dataset from the indoor area of the BRIN Workshop Building in Bandung. The experiments revealed that the algorithm runs more optimally on the Jetson Nano platform after conversion to TensorRT compared to the ONNX model, achieving processing speeds of approximately 101 ms using CULane and 105 ms using TuSimple, which is about 22 times faster than the previous model. While the algorithm demonstrates good accuracy on the outdoor public dataset, its performance falls short on the indoor dataset. Future work should focus on transfer learning and fine-tuning to enhance indoor lane detection accuracy.
* 4 pages, 9 figures 2 tables
Autonomous Docking Method via Non-linear Model Predictive Control
Dec 27, 2023This paper presents a proposed method of autonomous control for docking tasks of a single-seat personal mobility vehicle. We proposed a non-linear model predictive control (NMPC) based visual servoing to achieves the desired autonomous docking task. The proposed method is implemented on a four-wheel electric wheelchair platform, with two independent rear driving wheels and two front castor wheels. The NMPC-based visual servoing technique leverages the information extracted from a visual sensor as a real-time feedback for the NMPC to control the motion of the vehicle achieving the desired autonomous docking task. To evaluate the performance of the proposed controller method, a number of experiments both in simulation and in the actual setting. The controller performance is then evaluated based on the controller design requirement. The simulation results on autonomous docking experiments show that the proposed controller has been successfully achieve the desired controller design requirement to generate realtime trajectory for the vehicle performing autonomous docking tasks in several different scenarios.
* 6 pages, 8 figures, 2 tables
Optimized Object Tracking Technique Using Kalman Filter
Mar 07, 2021
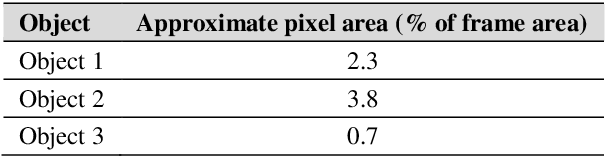
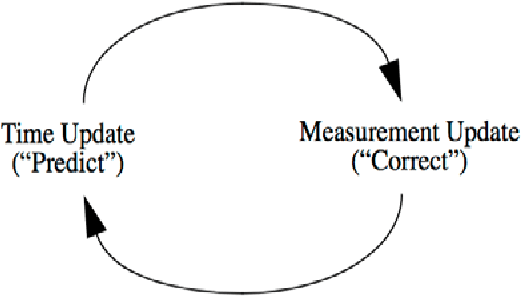
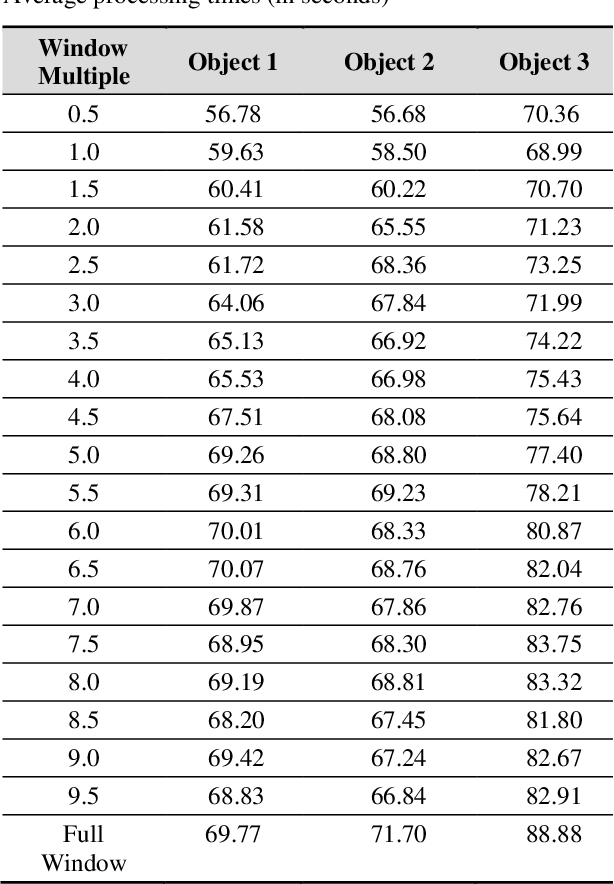
This paper focused on the design of an optimized object tracking technique which would minimize the processing time required in the object detection process while maintaining accuracy in detecting the desired moving object in a cluttered scene. A Kalman filter based cropped image is used for the image detection process as the processing time is significantly less to detect the object when a search window is used that is smaller than the entire video frame. This technique was tested with various sizes of the window in the cropping process. MATLAB was used to design and test the proposed method. This paper found that using a cropped image with 2.16 multiplied by the largest dimension of the object resulted in significantly faster processing time while still providing a high success rate of detection and a detected center of the object that was reasonably close to the actual center.
* 10 pages, 14 figures, published in J. Mechatron. Electr. Power Veh. Technol 07 (2016) 57-66
Sim-to-Real Learning for Casualty Detection from Ground Projected Point Cloud Data
Aug 09, 2019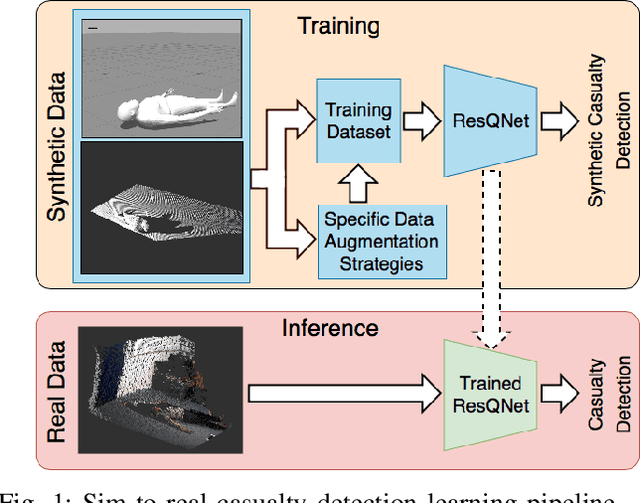

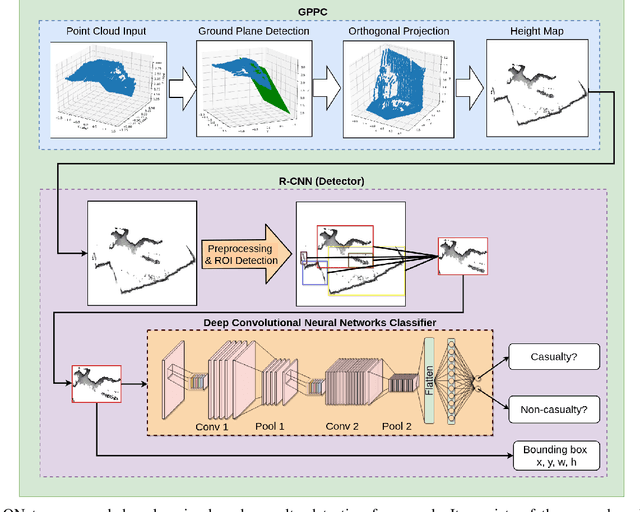
This paper addresses the problem of human body detection---particularly a human body lying on the ground (a.k.a. casualty)---using point cloud data. This ability to detect a casualty is one of the most important features of mobile rescue robots, in order for them to be able to operate autonomously. We propose a deep-learning-based casualty detection method using a deep convolutional neural network (CNN). This network is trained to be able to detect a casualty using a point-cloud data input. In the method we propose, the point cloud input is pre-processed to generate a depth image-like ground-projected heightmap. This heightmap is generated based on the projected distance of each point onto the detected ground plane within the point cloud data. The generated heightmap -- in image form -- is then used as an input for the CNN to detect a human body lying on the ground. To train the neural network, we propose a novel sim-to-real approach, in which the network model is trained using synthetic data obtained in simulation and then tested on real sensor data. To make the model transferable to real data implementations, during the training we adopt specific data augmentation strategies with the synthetic training data. The experimental results show that data augmentation introduced during the training process is essential for improving the performance of the trained model on real data. More specifically, the results demonstrate that the data augmentations on raw point-cloud data have contributed to a considerable improvement of the trained model performance.
Implementation 2D EKF-Based Simultaneous Localisation and Mapping for Mobile Robot
May 16, 2019


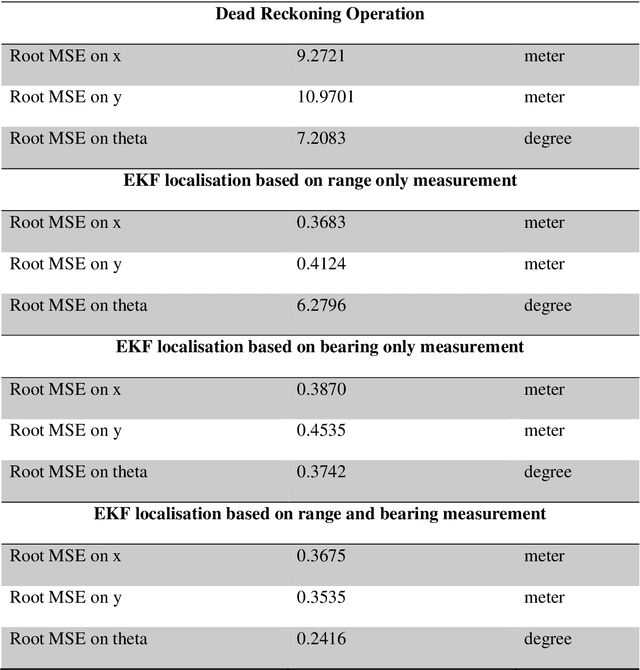
The main goal of this project is that the basic EKF-based SLAM operation can be implemented sufficiently for estimating the state of the UGV that is operated in this real environment involving dynamic objects. Several problems in practical implementation of SLAM operation such as processing measurement data, removing bias measurement, extracting landmarks from the measurement data, pre-filtering extracted landmarks and data association in the observed landmarks are observed during the operation of EKF-based SLAM system . In addition, the comparison of EKF-based SLAM operation with dead reckoning operation and Global Positioning System (GPS) are also performed to determine the effectiveness and performance of EKF-based SLAM operation in the real environment.
ResQbot: A Mobile Rescue Robot with Immersive Teleperception for Casualty Extraction
Dec 21, 2018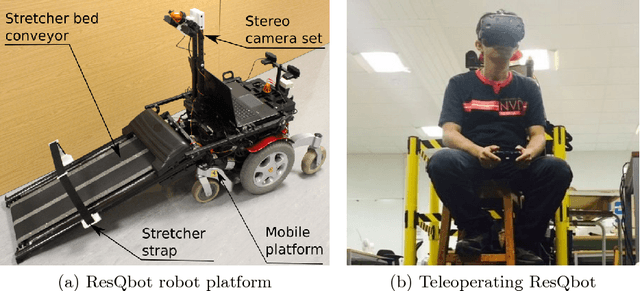



In this work, we propose a novel mobile rescue robot equipped with an immersive stereoscopic teleperception and a teleoperation control. This robot is designed with the capability to perform safely a casualty-extraction procedure. We have built a proof-of-concept mobile rescue robot called ResQbot for the experimental platform. An approach called "loco-manipulation" is used to perform the casualty-extraction procedure using the platform. The performance of this robot is evaluated in terms of task accomplishment and safety by conducting a mock rescue experiment. We use a custom-made human-sized dummy that has been sensorised to be used as the casualty. In terms of safety, we observe several parameters during the experiment including impact force, acceleration, speed and displacement of the dummy's head. We also compare the performance of the proposed immersive stereoscopic teleperception to conventional monocular teleperception. The results of the experiments show that the observed safety parameters are below key safety thresholds which could possibly lead to head or neck injuries. Moreover, the teleperception comparison results demonstrate an improvement in task-accomplishment performance when the operator is using the immersive teleperception.
* Published in TAROS 2018
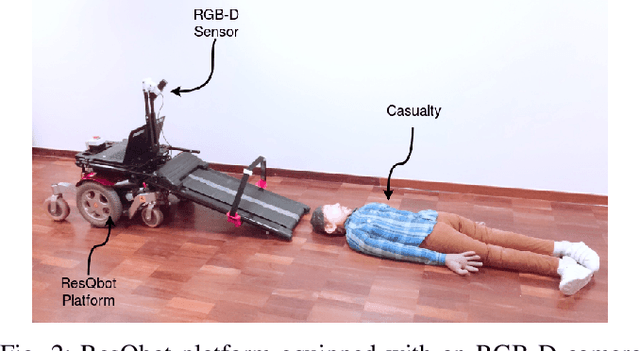
Casualty Detection from 3D Point Cloud Data for Autonomous Ground Mobile Rescue Robots
Dec 21, 2018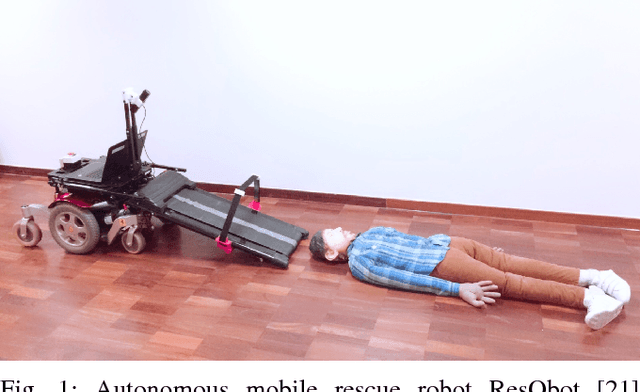



One of the most important features of mobile rescue robots is the ability to autonomously detect casualties, i.e. human bodies, which are usually lying on the ground. This paper proposes a novel method for autonomously detecting casualties lying on the ground using obtained 3D point-cloud data from an on-board sensor, such as an RGB-D camera or a 3D LIDAR, on a mobile rescue robot. In this method, the obtained 3D point-cloud data is projected onto the detected ground plane, i.e. floor, within the point cloud. Then, this projected point cloud is converted into a grid-map that is used afterwards as an input for the algorithm to detect human body shapes. The proposed method is evaluated by performing detection of a human dummy, placed in different random positions and orientations, using an on-board RGB-D camera on a mobile rescue robot called ResQbot. To evaluate the robustness of the casualty detection method to different camera angles, the orientation of the camera is set to different angles. The experimental results show that using the point-cloud data from the on-board RGB-D camera, the proposed method successfully detects the casualty in all tested body positions and orientations relative to the on-board camera, as well as in all tested camera angles.
* Published in SSRR 2018 Conference