 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementation of Real-Time Lane Detection on Autonomous Mobile Robot
Nov 22, 2024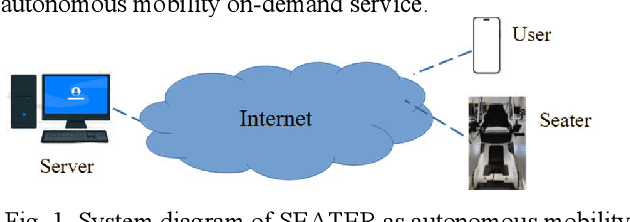
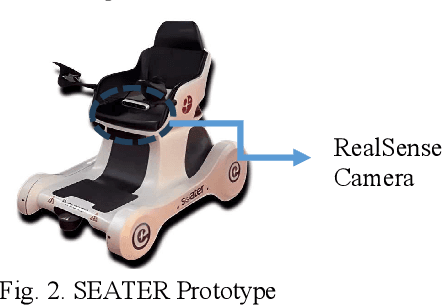

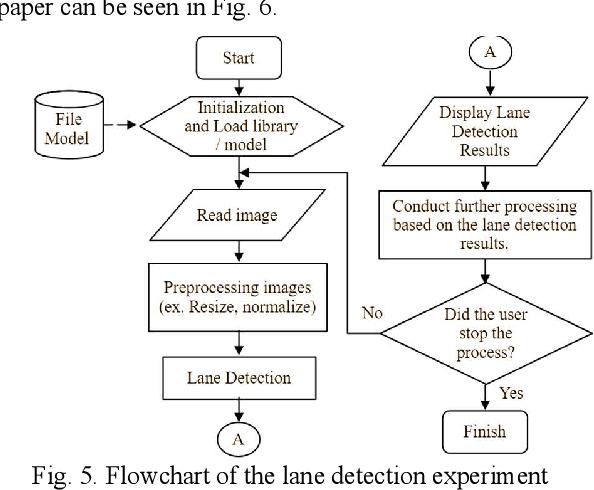
This paper describes the implementation of a learning-based lane detection algorithm on an Autonomous Mobile Robot. It aims to implement the Ultra Fast Lane Detection algorithm for real-time application on the SEATER P2MC-BRIN prototype using a camera and optimize its performance on the Jetson Nano platform. Preliminary experiments were conducted to evaluate the algorithm's performance in terms of data processing speed and accuracy using two types of datasets: outdoor using a public dataset and indoor using an internal dataset from the indoor area of the BRIN Workshop Building in Bandung. The experiments revealed that the algorithm runs more optimally on the Jetson Nano platform after conversion to TensorRT compared to the ONNX model, achieving processing speeds of approximately 101 ms using CULane and 105 ms using TuSimple, which is about 22 times faster than the previous model. While the algorithm demonstrates good accuracy on the outdoor public dataset, its performance falls short on the indoor dataset. Future work should focus on transfer learning and fine-tuning to enhance indoor lane detection accuracy.
* 4 pages, 9 figures 2 tables
Autonomous Docking Method via Non-linear Model Predictive Control
Dec 27, 2023This paper presents a proposed method of autonomous control for docking tasks of a single-seat personal mobility vehicle. We proposed a non-linear model predictive control (NMPC) based visual servoing to achieves the desired autonomous docking task. The proposed method is implemented on a four-wheel electric wheelchair platform, with two independent rear driving wheels and two front castor wheels. The NMPC-based visual servoing technique leverages the information extracted from a visual sensor as a real-time feedback for the NMPC to control the motion of the vehicle achieving the desired autonomous docking task. To evaluate the performance of the proposed controller method, a number of experiments both in simulation and in the actual setting. The controller performance is then evaluated based on the controller design requirement. The simulation results on autonomous docking experiments show that the proposed controller has been successfully achieve the desired controller design requirement to generate realtime trajectory for the vehicle performing autonomous docking tasks in several different scenarios.
* 6 pages, 8 figures, 2 tables
Optimized Object Tracking Technique Using Kalman Filter
Mar 07, 2021
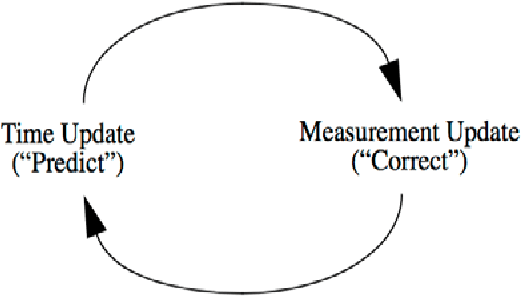
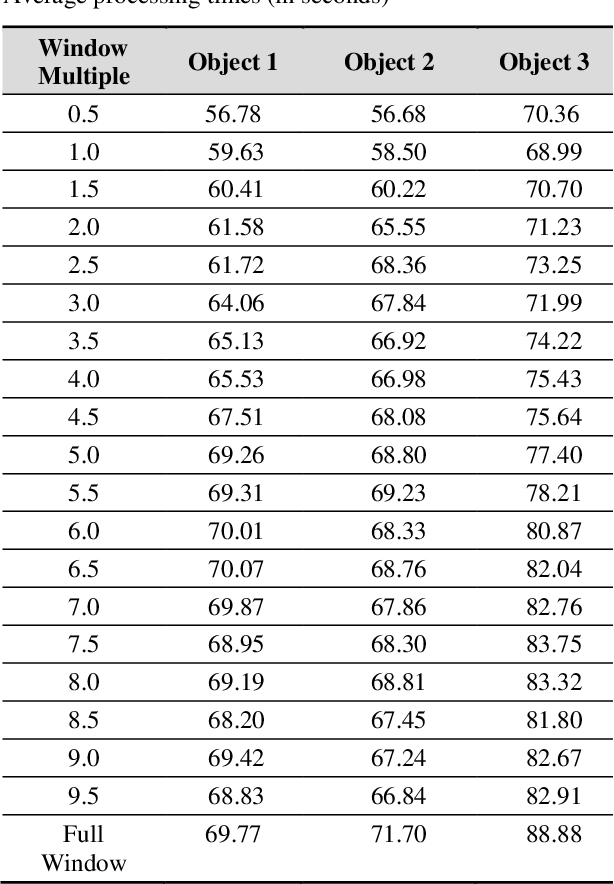
This paper focused on the design of an optimized object tracking technique which would minimize the processing time required in the object detection process while maintaining accuracy in detecting the desired moving object in a cluttered scene. A Kalman filter based cropped image is used for the image detection process as the processing time is significantly less to detect the object when a search window is used that is smaller than the entire video frame. This technique was tested with various sizes of the window in the cropping process. MATLAB was used to design and test the proposed method. This paper found that using a cropped image with 2.16 multiplied by the largest dimension of the object resulted in significantly faster processing time while still providing a high success rate of detection and a detected center of the object that was reasonably close to the actual center.
* 10 pages, 14 figures, published in J. Mechatron. Electr. Power Veh. Technol 07 (2016) 57-66