 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTolerance of Reinforcement Learning Controllers against Deviations in Cyber Physical Systems
Jun 24, 2024



Cyber-physical systems (CPS) with reinforcement learning (RL)-based controllers are increasingly being deployed in complex physical environments such as autonomous vehicles, the Internet-of-Things(IoT), and smart cities. An important property of a CPS is tolerance; i.e., its ability to function safely under possible disturbances and uncertainties in the actual operation. In this paper, we introduce a new, expressive notion of tolerance that describes how well a controller is capable of satisfying a desired system requirement, specified using Signal Temporal Logic (STL), under possible deviations in the system. Based on this definition, we propose a novel analysis problem, called the tolerance falsification problem, which involves finding small deviations that result in a violation of the given requirement. We present a novel, two-layer simulation-based analysis framework and a novel search heuristic for finding small tolerance violations. To evaluate our approach, we construct a set of benchmark problems where system parameters can be configured to represent different types of uncertainties and disturbancesin the system. Our evaluation shows that our falsification approach and heuristic can effectively find small tolerance violations.
Safe Planning through Incremental Decomposition of Signal Temporal Logic Specifications
Mar 19, 2024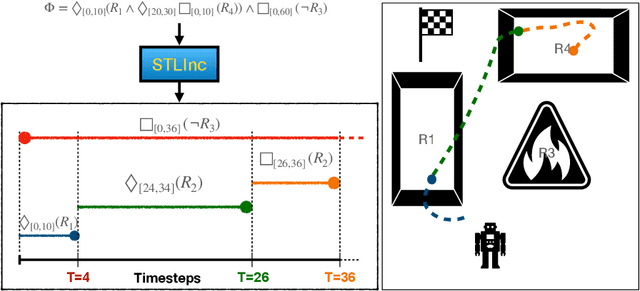



Trajectory planning is a critical process that enables autonomous systems to safely navigate complex environments. Signal temporal logic (STL) specifications are an effective way to encode complex temporally extended objectives for trajectory planning in cyber-physical systems (CPS). However, planning from these specifications using existing techniques scale exponentially with the number of nested operators and the horizon of specification. Additionally, performance is exacerbated at runtime due to limited computational budgets and compounding modeling errors. Decomposing a complex specification into smaller subtasks and incrementally planning for them can remedy these issues. In this work, we present a way to decompose STL requirements temporally to improve planning efficiency and performance. The key insight in our work is to encode all specifications as a set of reachability and invariance constraints and scheduling these constraints sequentially at runtime. Our proposed technique outperforms the state-of-the-art trajectory synthesis techniques for both linear and non linear dynamical systems.