 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling Human Routines: Conceptualising Social Practice Theory for Agent-Based Simulation
Dec 22, 2020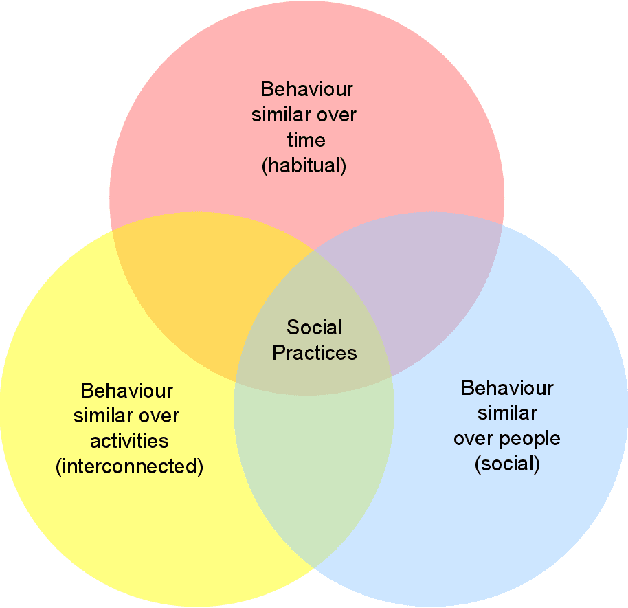
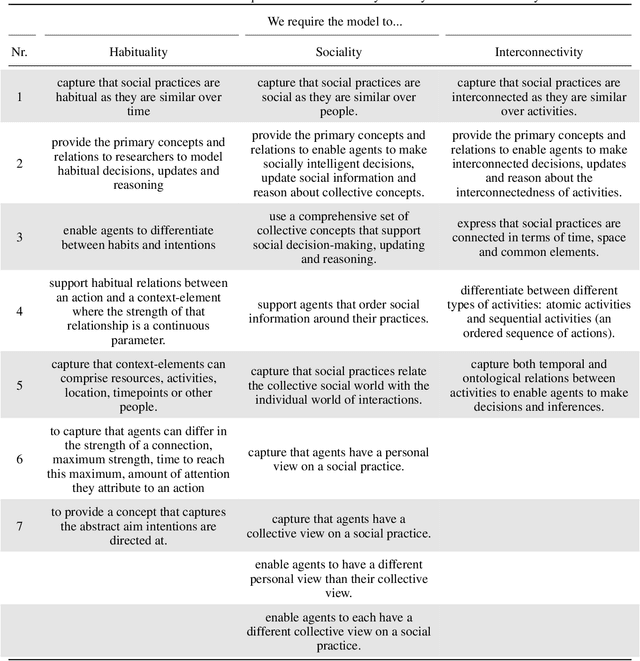
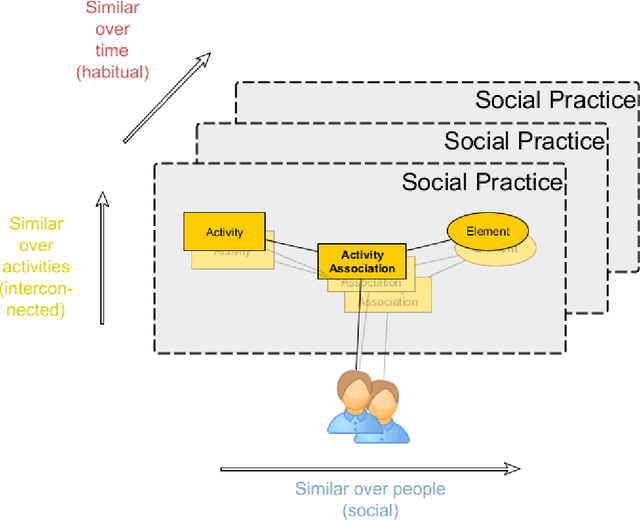
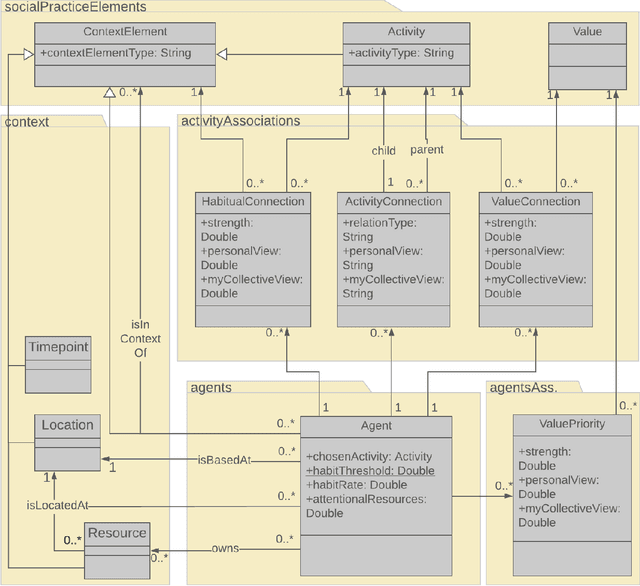
Our routines play an important role in a wide range of social challenges such as climate change, disease outbreaks and coordinating staff and patients in a hospital. To use agent-based simulations (ABS) to understand the role of routines in social challenges we need an agent framework that integrates routines. This paper provides the domain-independent Social Practice Agent (SoPrA) framework that satisfies requirements from the literature to simulate our routines. By choosing the appropriate concepts from the literature on agent theory, social psychology and social practice theory we ensure SoPrA correctly depicts current evidence on routines. By creating a consistent, modular and parsimonious framework suitable for multiple domains we enhance the usability of SoPrA. SoPrA provides ABS researchers with a conceptual, formal and computational framework to simulate routines and gain new insights into social systems.
Improving Confidence in the Estimation of Values and Norms
Apr 02, 2020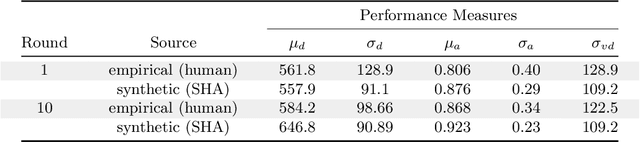
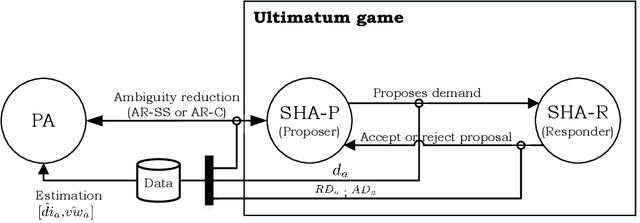
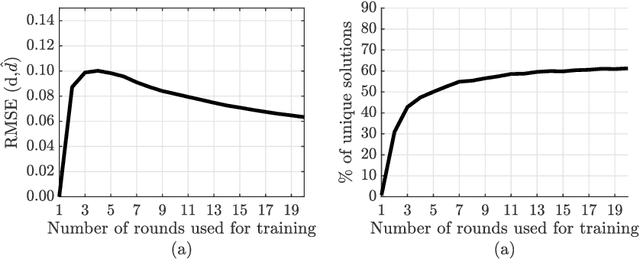

Autonomous agents (AA) will increasingly be interacting with us in our daily lives. While we want the benefits attached to AAs, it is essential that their behavior is aligned with our values and norms. Hence, an AA will need to estimate the values and norms of the humans it interacts with, which is not a straightforward task when solely observing an agent's behavior. This paper analyses to what extent an AA is able to estimate the values and norms of a simulated human agent (SHA) based on its actions in the ultimatum game. We present two methods to reduce ambiguity in profiling the SHAs: one based on search space exploration and another based on counterfactual analysis. We found that both methods are able to increase the confidence in estimating human values and norms, but differ in their applicability, the latter being more efficient when the number of interactions with the agent is to be minimized. These insights are useful to improve the alignment of AAs with human values and norms.