 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime--to--Digital Converter (TDC)--Based Resonant Compute--in--Memory for INT8 CNNs with Layer--Optimized SRAM Mapping
Jan 01, 2026In recent years, Compute-in-memory (CiM) architectures have emerged as a promising solution for deep neural network (NN) accelerators. Multiply-accumulate~(MAC) is considered a {\textit de facto} unit operation in NNs. By leveraging the inherent parallel processing capabilities of CiM, NNs that require numerous MAC operations can be executed more efficiently. This is further facilitated by storing the weights in SRAM, reducing the need for extensive data movement and enhancing overall computational speed and efficiency. Traditional CiM architectures execute MAC operations in the analog domain, employing an Analog-to-Digital converter (ADC) to convert the analog MAC values into digital outputs. However, these ADCs introduce significant increase in area and power consumption, as well as introduce non-linearities. This work proposes a resonant time-domain compute-in-memory (TDC-CiM) architecture that eliminates the need for an ADC by using a time-to-digital converter (TDC) to digitize analog MAC results with lower power and area cost. A dedicated 8T SRAM cell enables reliable bitwise MAC operations, while the readout uses a 4-bit TDC with pulse-shrinking delay elements, achieving 1 GS/s sampling with a power consumption of only 1.25 mW. In addition, a weight stationary data mapping strategy combined with an automated SRAM macro selection algorithm enables scalable and energy-efficient deployment across CNN workloads. Evaluation across six CNN models shows that the algorithm reduces inference energy consumption by up to 8x when scaling SRAM size from 32~KB to 256~KB, while maintaining minimal accuracy loss after quantization. The feasibility of the proposed architecture is validated on an 8~KB SRAM memory array using TSMC 28~nm technology. The proposed TDC-CiM architecture demonstrates a throughput of 320~GOPS with an energy efficiency of 38.46~TOPS/W.
TSPC-PFD: TSPC-Based Low-Power High-Resolution CMOS Phase Frequency Detector
Aug 23, 2025Phase Frequency Detectors (PFDs) are essential components in Phase-Locked Loop (PLL) and Delay-Locked Loop (DLL) systems, responsible for comparing phase and frequency differences and generating up/down signals to regulate charge pumps and/or, consequently, Voltage-Controlled Oscillators (VCOs). Conventional PFD designs often suffer from significant dead zones and blind zones, which degrade phase detection accuracy and increase jitter in high-speed applications. This paper addresses PFD design challenges and presents a novel low-power True Single-Phase Clock (TSPC)-based PFD. The proposed design eliminates the blind zone entirely while achieving a minimal dead zone of 40 ps. The proposed PFD, implemented using TSMC 28 nm technology, demonstrates a low-power consumption of 4.41 uW at 3 GHz input frequency with a layout area of $10.42\mu m^2$.
EA: An Event Autoencoder for High-Speed Vision Sensing
Jul 09, 2025High-speed vision sensing is essential for real-time perception in applications such as robotics, autonomous vehicles, and industrial automation. Traditional frame-based vision systems suffer from motion blur, high latency, and redundant data processing, limiting their performance in dynamic environments. Event cameras, which capture asynchronous brightness changes at the pixel level, offer a promising alternative but pose challenges in object detection due to sparse and noisy event streams. To address this, we propose an event autoencoder architecture that efficiently compresses and reconstructs event data while preserving critical spatial and temporal features. The proposed model employs convolutional encoding and incorporates adaptive threshold selection and a lightweight classifier to enhance recognition accuracy while reducing computational complexity. Experimental results on the existing Smart Event Face Dataset (SEFD) demonstrate that our approach achieves comparable accuracy to the YOLO-v4 model while utilizing up to $35.5\times$ fewer parameters. Implementations on embedded platforms, including Raspberry Pi 4B and NVIDIA Jetson Nano, show high frame rates ranging from 8 FPS up to 44.8 FPS. The proposed classifier exhibits up to 87.84x better FPS than the state-of-the-art and significantly improves event-based vision performance, making it ideal for low-power, high-speed applications in real-time edge computing.
Descriptor: Face Detection Dataset for Programmable Threshold-Based Sparse-Vision
Oct 01, 2024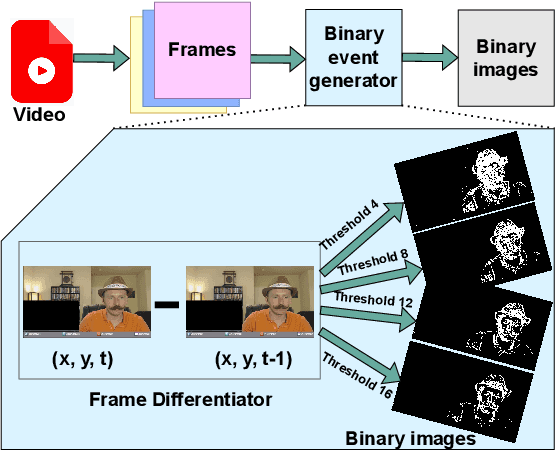
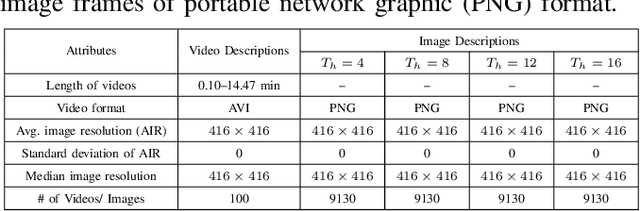
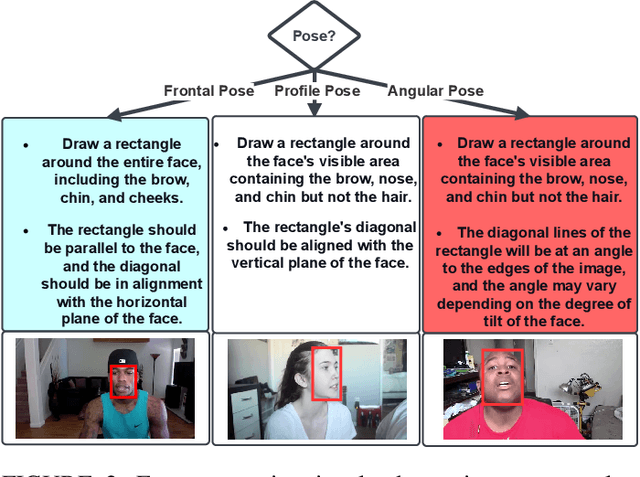

Smart focal-plane and in-chip image processing has emerged as a crucial technology for vision-enabled embedded systems with energy efficiency and privacy. However, the lack of special datasets providing examples of the data that these neuromorphic sensors compute to convey visual information has hindered the adoption of these promising technologies. Neuromorphic imager variants, including event-based sensors, produce various representations such as streams of pixel addresses representing time and locations of intensity changes in the focal plane, temporal-difference data, data sifted/thresholded by temporal differences, image data after applying spatial transformations, optical flow data, and/or statistical representations. To address the critical barrier to entry, we provide an annotated, temporal-threshold-based vision dataset specifically designed for face detection tasks derived from the same videos used for Aff-Wild2. By offering multiple threshold levels (e.g., 4, 8, 12, and 16), this dataset allows for comprehensive evaluation and optimization of state-of-the-art neural architectures under varying conditions and settings compared to traditional methods. The accompanying tool flow for generating event data from raw videos further enhances accessibility and usability. We anticipate that this resource will significantly support the development of robust vision systems based on smart sensors that can process based on temporal-difference thresholds, enabling more accurate and efficient object detection and localization and ultimately promoting the broader adoption of low-power, neuromorphic imaging technologies. To support further research, we publicly released the dataset at \url{https://dx.doi.org/10.21227/bw2e-dj78}.
Introduction to Medical Imaging Informatics
Jun 07, 2023



Medical imaging informatics is a rapidly growing field that combines the principles of medical imaging and informatics to improve the acquisition, management, and interpretation of medical images. This chapter introduces the basic concepts of medical imaging informatics, including image processing, feature engineering, and machine learning. It also discusses the recent advancements in computer vision and deep learning technologies and how they are used to develop new quantitative image markers and prediction models for disease detection, diagnosis, and prognosis prediction. By covering the basic knowledge of medical imaging informatics, this chapter provides a foundation for understanding the role of informatics in medicine and its potential impact on patient care.
GGNB: Graph-Based Gaussian Naive Bayes Intrusion Detection System for CAN Bus
Aug 24, 2021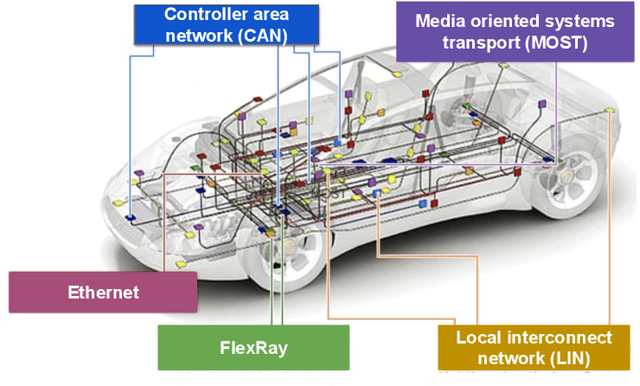
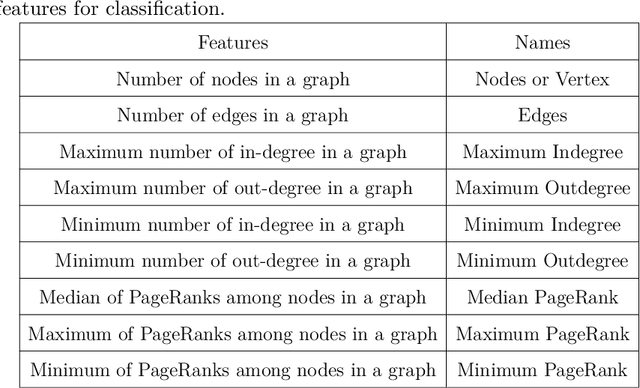
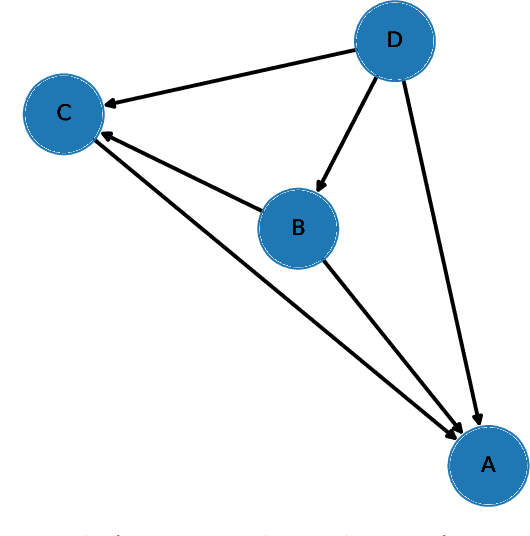

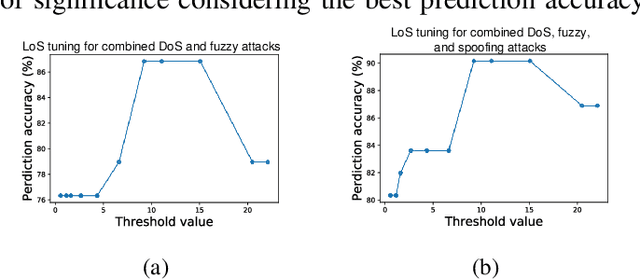
The national highway traffic safety administration (NHTSA) identified cybersecurity of the automobile systems are more critical than the security of other information systems. Researchers already demonstrated remote attacks on critical vehicular electronic control units (ECUs) using controller area network (CAN). Besides, existing intrusion detection systems (IDSs) often propose to tackle a specific type of attack, which may leave a system vulnerable to numerous other types of attacks. A generalizable IDS that can identify a wide range of attacks within the shortest possible time has more practical value than attack-specific IDSs, which is not a trivial task to accomplish. In this paper we propose a novel {\textbf g}raph-based {\textbf G}aussian {\textbf n}aive {\textbf B}ayes (GGNB) intrusion detection algorithm by leveraging graph properties and PageRank-related features. The GGNB on the real rawCAN data set~\cite{Lee:2017} yields 99.61\%, 99.83\%, 96.79\%, and 96.20\% detection accuracy for denial of service (DoS), fuzzy, spoofing, replay, mixed attacks, respectively. Also, using OpelAstra data set~\cite{Guillaume:2019}, the proposed methodology has 100\%, 99.85\%, 99.92\%, 100\%, 99.92\%, 97.75\% and 99.57\% detection accuracy considering DoS, diagnostic, fuzzing CAN ID, fuzzing payload, replay, suspension, and mixed attacks, respectively. The GGNB-based methodology requires about $239\times$ and $135\times$ lower training and tests times, respectively, compared to the SVM classifier used in the same application. Using Xilinx Zybo Z7 field-programmable gate array (FPGA) board, the proposed GGNB requires $5.7 \times$, $5.9 \times$, $5.1 \times$, and $3.6 \times$ fewer slices, LUTs, flip-flops, and DSP units, respectively, than conventional NN architecture.
Graph-Based Intrusion Detection System for Controller Area Networks
Sep 29, 2020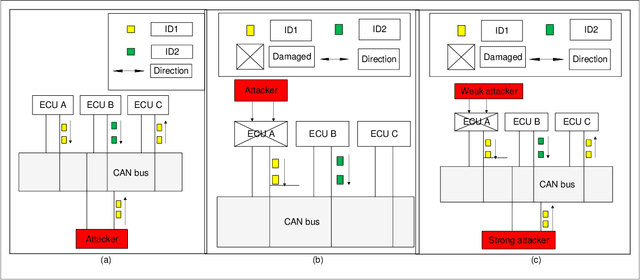
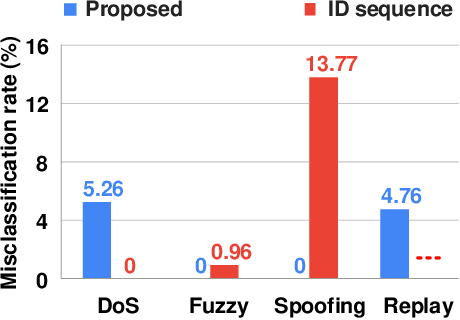
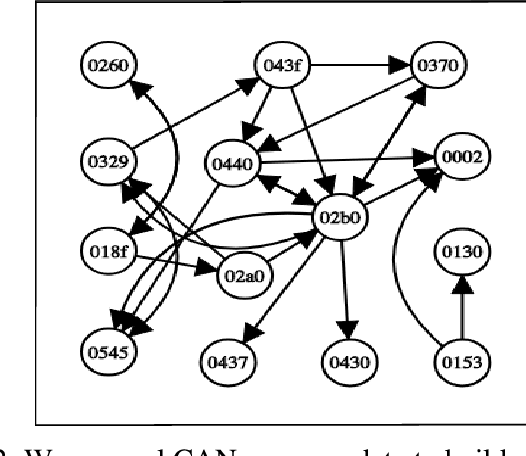
The controller area network (CAN) is the most widely used intra-vehicular communication network in the automotive industry. Because of its simplicity in design, it lacks most of the requirements needed for a security-proven communication protocol. However, a safe and secured environment is imperative for autonomous as well as connected vehicles. Therefore CAN security is considered one of the important topics in the automotive research community. In this paper, we propose a four-stage intrusion detection system that uses the chi-squared method and can detect any kind of strong and weak cyber attacks in a CAN. This work is the first-ever graph-based defense system proposed for the CAN. Our experimental results show that we have a very low 5.26% misclassification for denial of service (DoS) attack, 10% misclassification for fuzzy attack, 4.76% misclassification for replay attack, and no misclassification for spoofing attack. In addition, the proposed methodology exhibits up to 13.73% better accuracy compared to existing ID sequence-based methods.