 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Moving Horizon Estimation: A Systematic Literature Review
Jun 21, 2024The neural moving horizon estimator (NMHE) is a relatively new and powerful state estimator that combines the strengths of neural networks (NNs) and model-based state estimation techniques. Various approaches exist for constructing NMHEs, each with its unique advantages and limitations. However, a comprehensive literature review that consolidates existing knowledge, outlines design guidelines and highlights future research directions is currently lacking. This systematic literature review synthesizes the existing knowledge on NMHE, addressing the above knowledge gap. The paper (1) explains the fundamental principles of NMHE, (2) explores different NMHE architectures, discussing the pros and cons of each, (3) investigates the NN architectures used in NMHE, providing insights for future designs, (4) examines the real-time implementability of current approaches, offering recommendations for practical applications, and (5) discusses the current limitations of NMHE approaches and outlines directions for future research. These insights can significantly improve the design and application of NMHE, which is critical for enhancing state estimation in complex systems.
Multi-Model Predictive Attitude Control of Quadrotors
Jun 21, 2024



This paper introduces a new multi-model predictive control (MMPC) method for quadrotor attitude control with performance nearly on par with nonlinear model predictive control (NMPC) and computational efficiency similar to linear model predictive control (LMPC). Conventional NMPC, while effective, is computationally intensive, especially for attitude control that needs a high refresh rate. Conversely, LMPC offers computational advantages but suffers from poor performance and local stability. Our approach relies on multiple linear models of attitude dynamics, each accompanied by a linear model predictive controller, dynamically switching between them given flight conditions. We leverage gap metric analysis to minimize the number of models required to accurately predict the vehicle behavior in various conditions and incorporate a soft switching mechanism to ensure system stability during controller transitions. Our results show that with just 15 models, the vehicle attitude can be accurately controlled across various set points. Comparative evaluations with existing controllers such as incremental nonlinear dynamic inversion, sliding mode control, LMPC, and NMPC reveal that our approach closely matches the effectiveness of NMPC, outperforming other methods, with a running time comparable to LMPC.
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Jun 10, 2024



This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
Quaternion-Based Sliding Mode Control for Six Degrees of Freedom Flight Control of Quadrotors
Mar 16, 2024Despite extensive research on sliding mode control (SMC) design for quadrotors, the existing approaches suffer from certain limitations. Euler angle-based SMC formulations suffer from poor performance in high-pitch or -roll maneuvers. Quaternion-based SMC approaches have unwinding issues and complex architecture. Coordinate-free methods are slow and only almost globally stable. This paper presents a new six degrees of freedom SMC flight controller to address the above limitations. We use a cascaded architecture with a position controller in the outer loop and a quaternion-based attitude controller in the inner loop. The position controller generates the desired trajectory for the attitude controller using a coordinate-free approach. The quaternion-based attitude controller uses the natural characteristics of the quaternion hypersphere, featuring a simple structure while providing global stability and avoiding unwinding issues. We compare our controller with three other common control methods conducting challenging maneuvers like flip-over and high-speed trajectory tracking in the presence of model uncertainties and disturbances. Our controller consistently outperforms the benchmark approaches with less control effort and actuator saturation, offering highly effective and efficient flight control.
Reinforcement learning adaptive fuzzy controller for lighting systems: application to aircraft cabin
Sep 30, 2023The lighting requirements are subjective and one light setting cannot work for all. However, there is little work on developing smart lighting algorithms that can adapt to user preferences. To address this gap, this paper uses fuzzy logic and reinforcement learning to develop an adaptive lighting algorithm. In particular, we develop a baseline fuzzy inference system (FIS) using the domain knowledge. We use the existing literature to create a FIS that generates lighting setting recommendations based on environmental conditions i.e. daily glare index, and user information including age, activity, and chronotype. Through a feedback mechanism, the user interacts with the algorithm, correcting the algorithm output to their preferences. We interpret these corrections as rewards to a Q-learning agent, which tunes the FIS parameters online to match the user preferences. We implement the algorithm in an aircraft cabin mockup and conduct an extensive user study to evaluate the effectiveness of the algorithm and understand its learning behavior. Our implementation results demonstrate that the developed algorithm possesses the capability to learn user preferences while successfully adapting to a wide range of environmental conditions and user characteristics. and can deal with a diverse spectrum of environmental conditions and user characteristics. This underscores its viability as a potent solution for intelligent light management, featuring advanced learning capabilities.
High-Gain Disturbance Observer for Robust Trajectory Tracking of Quadrotors
May 30, 2023This paper presents a simple method to boost the robustness of quadrotors in trajectory tracking. The presented method features a high-gain disturbance observer (HGDO) that provides disturbance estimates in real-time. The estimates are then used in a trajectory control law to compensate for disturbance effects. We present theoretical convergence results showing that the proposed HGDO can quickly converge to an adjustable neighborhood of actual disturbance values. We will then integrate the disturbance estimates with a typical robust trajectory controller, namely sliding mode control (SMC), and present Lyapunov stability analysis to establish the boundedness of trajectory tracking errors. However, our stability analysis can be easily extended to other Lyapunov-based controllers to develop different HGDO-based controllers with formal stability guarantees. We evaluate the proposed HGDO-based control method using both simulation and laboratory experiments in various scenarios and in the presence of external disturbances. Our results indicate that the addition of HGDO to a quadrotor trajectory controller can significantly improve the accuracy and precision of trajectory tracking in the presence of external disturbances.
Sensor Fault Detection and Compensation with Performance Prescription for Robotic Manipulators
May 30, 2023
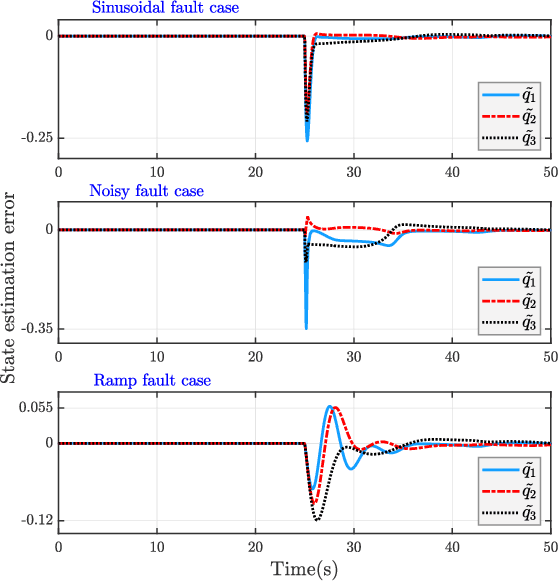


This paper focuses on sensor fault detection and compensation for robotic manipulators. The proposed method features a new adaptive observer and a new terminal sliding mode control law established on a second-order integral sliding surface. The method enables sensor fault detection without the need to impose known bounds on fault value and/or its derivative. It also enables fast and fixed-time fault-tolerant control whose performance can be prescribed beforehand by defining funnel bounds on the tracking error. The ultimate boundedness of the estimation errors for the proposed observer and the fixed-time stability of the control system are shown using Lyapunov stability analysis. The effectiveness of the proposed method is verified using numerical simulations on two different robotic manipulators, and the results are compared with existing methods. Our results demonstrate performance gains obtained by the proposed method compared to the existing results.