 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Jun 10, 2024



This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
Sensor Fault Detection and Compensation with Performance Prescription for Robotic Manipulators
May 30, 2023
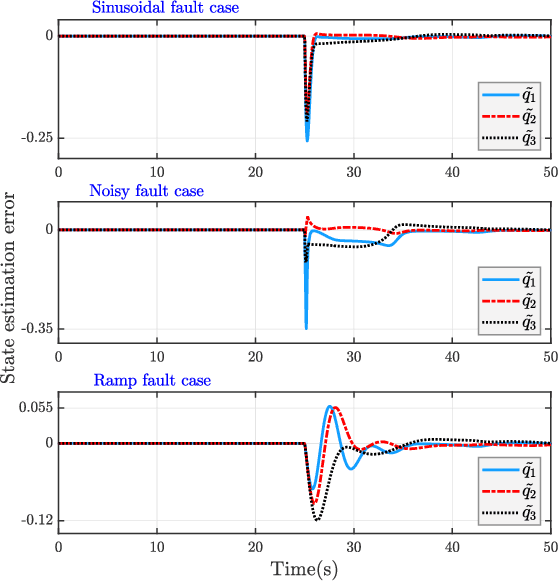


This paper focuses on sensor fault detection and compensation for robotic manipulators. The proposed method features a new adaptive observer and a new terminal sliding mode control law established on a second-order integral sliding surface. The method enables sensor fault detection without the need to impose known bounds on fault value and/or its derivative. It also enables fast and fixed-time fault-tolerant control whose performance can be prescribed beforehand by defining funnel bounds on the tracking error. The ultimate boundedness of the estimation errors for the proposed observer and the fixed-time stability of the control system are shown using Lyapunov stability analysis. The effectiveness of the proposed method is verified using numerical simulations on two different robotic manipulators, and the results are compared with existing methods. Our results demonstrate performance gains obtained by the proposed method compared to the existing results.