 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Supervised Learning Methodology for Real-Time Disguised Face Recognition in the Wild
Sep 08, 2018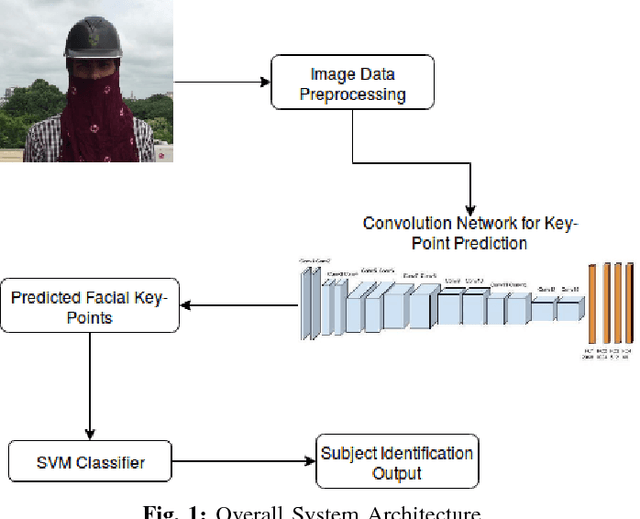



Facial recognition has always been a challeng- ing task for computer vision scientists and experts. Despite complexities arising due to variations in camera parameters, illumination and face orientations, significant progress has been made in the field with deep learning algorithms now competing with human-level accuracy. But in contrast to the recent advances in face recognition techniques, Disguised Facial Identification continues to be a tougher challenge in the field of computer vision. The modern day scenario, where security is of prime concern, regular face identification techniques do not perform as required when the faces are disguised, which calls for a different approach to handle situations where intruders have their faces masked. Along the same lines, we propose a deep learning architecture for disguised facial recognition (DFR). The algorithm put forward in this paper detects 20 facial key-points in the first stage, using a 14-layered convolutional neural network (CNN). These facial key-points are later utilized by a support vector machine (SVM) for classifying the disguised faces based on the euclidean distance ratios and angles between different facial key-points. This overall architecture imparts a basic intelligence to our system. Our key-point feature prediction accuracy is 65% while the classification rate is 72.4%. Moreover, the architecture works at 19 FPS, thereby performing in almost real-time. The efficiency of our approach is also compared with the state-of-the-art Disguised Facial Identification methods.
A Real-time Control Approach for Unmanned Aerial Vehicles using Brain-computer Interface
Sep 02, 2018

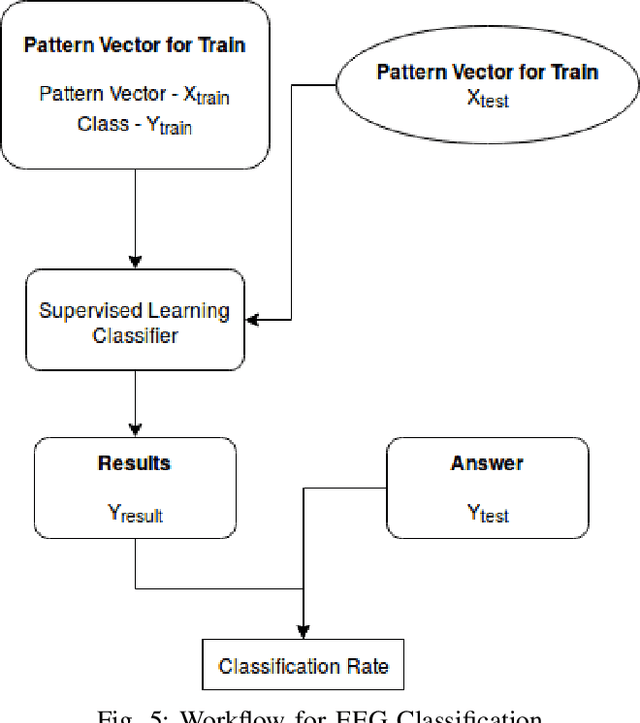
Brain-computer interfacing (BCI) is a technology that is almost four decades old and it was developed solely for the purpose of developing and enhancing the impact of neuroprosthetics. However, in the recent times, with the commercialization of non-invasive electroencephalogram (EEG) headsets, the technology has seen a wide variety of applications like home automation, wheelchair control, vehicle steering etc. One of the latest developed applications is the mind-controlled quadrotor unmanned aerial vehicle. These applications, how- ever, do not require a very high-speed response and give satisfactory results when standard classification methods like Support Vector Machine (SVM) and Multi-Layer Perceptron (MLPC). Issues are faced when there is a requirement for high-speed control in the case of fixed-wing unmanned aerial vehicles where such methods are rendered unreliable due to the low speed of classification. Such an application requires the system to classify data at high speeds in order to retain the con- trollability of the vehicle. This paper proposes a novel method of classification which uses a combination of Common Spatial Paradigm and Linear Discriminant Analysis that provides an improved classification accuracy in real time. A non-linear SVM based classification technique has also been discussed. Further, this paper discusses the implementation of the proposed method on a fixed-wing and VTOL unmanned aerial vehicles.