 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Prediction for Robot Navigation using Flow-Guided Markov Neural Operator
Sep 19, 2023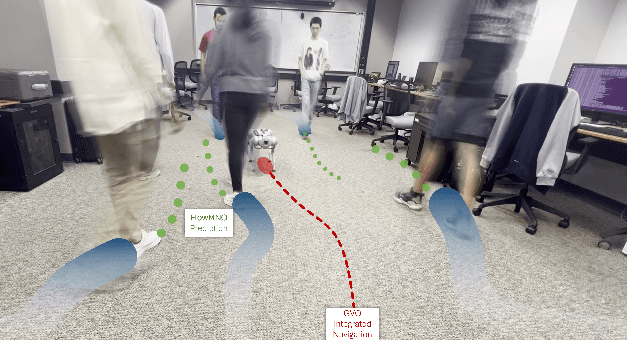



Predicting pedestrian movements remains a complex and persistent challenge in robot navigation research. We must evaluate several factors to achieve accurate predictions, such as pedestrian interactions, the environment, crowd density, and social and cultural norms. Accurate prediction of pedestrian paths is vital for ensuring safe human-robot interaction, especially in robot navigation. Furthermore, this research has potential applications in autonomous vehicles, pedestrian tracking, and human-robot collaboration. Therefore, in this paper, we introduce FlowMNO, an Optical Flow-Integrated Markov Neural Operator designed to capture pedestrian behavior across diverse scenarios. Our paper models trajectory prediction as a Markovian process, where future pedestrian coordinates depend solely on the current state. This problem formulation eliminates the need to store previous states. We conducted experiments using standard benchmark datasets like ETH, HOTEL, ZARA1, ZARA2, UCY, and RGB-D pedestrian datasets. Our study demonstrates that FlowMNO outperforms some of the state-of-the-art deep learning methods like LSTM, GAN, and CNN-based approaches, by approximately 86.46% when predicting pedestrian trajectories. Thus, we show that FlowMNO can seamlessly integrate into robot navigation systems, enhancing their ability to navigate crowded areas smoothly.
SG-LSTM: Social Group LSTM for Robot Navigation Through Dense Crowds
Mar 08, 2023With the increasing availability and affordability of personal robots, they will no longer be confined to large corporate warehouses or factories but will instead be expected to operate in less controlled environments alongside larger groups of people. In addition to ensuring safety and efficiency, it is crucial to minimize any negative psychological impact robots may have on humans and follow unwritten social norms in these situations. Our research aims to develop a model that can predict the movements of pedestrians and perceptually-social groups in crowded environments. We introduce a new Social Group Long Short-term Memory (SG-LSTM) model that models human groups and interactions in dense environments using a socially-aware LSTM to produce more accurate trajectory predictions. Our approach enables navigation algorithms to calculate collision-free paths faster and more accurately in crowded environments. Additionally, we also release a large video dataset with labeled pedestrian groups for the broader social navigation community. We show comparisons with different metrics on different datasets (ETH, Hotel, MOT15) and different prediction approaches (LIN, LSTM, O-LSTM, S-LSTM) as well as runtime performance.
NIO: Lightweight neural operator-based architecture for video frame interpolation
Nov 19, 2022We present, NIO - Neural Interpolation Operator, a lightweight efficient neural operator-based architecture to perform video frame interpolation. Current deep learning based methods rely on local convolutions for feature learning and require a large amount of training on comprehensive datasets. Furthermore, transformer-based architectures are large and need dedicated GPUs for training. On the other hand, NIO, our neural operator-based approach learns the features in the frames by translating the image matrix into the Fourier space by using Fast Fourier Transform (FFT). The model performs global convolution, making it discretization invariant. We show that NIO can produce visually-smooth and accurate results and converges in fewer epochs than state-of-the-art approaches. To evaluate the visual quality of our interpolated frames, we calculate the structural similarity index (SSIM) and Peak Signal to Noise Ratio (PSNR) between the generated frame and the ground truth frame. We provide the quantitative performance of our model on Vimeo-90K dataset, DAVIS, UCF101 and DISFA+ dataset.