 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuarantees for Sound Abstractions for Generalized Planning (Extended Paper)
May 31, 2019
Generalized planning is about finding plans that solve collections of planning instances, often infinite collections, rather than single instances. Recently it has been shown how to reduce the planning problem for generalized planning to the planning problem for a qualitative numerical problem; the latter being a reformulation that simultaneously captures all the instances in the collection. An important thread of research thus consists in finding such reformulations, or abstractions, automatically. A recent proposal learns the abstractions inductively from a finite and small sample of transitions from instances in the collection. However, as in all inductive processes, the learned abstraction is not guaranteed to be correct for the whole collection. In this work we address this limitation by performing an analysis of the abstraction with respect to the collection, and show how to obtain formal guarantees for generalization. These guarantees, in the form of first-order formulas, may be used to 1) define subcollections of instances on which the abstraction is guaranteed to be sound, 2) obtain necessary conditions for generalization under certain assumptions, and 3) do automated synthesis of complex invariants for planning problems. Our framework is general, it can be extended or combined with other approaches, and it has applications that go beyond generalized planning.
Scaling up Heuristic Planning with Relational Decision Trees
Jan 16, 2014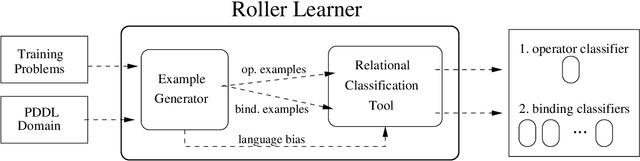
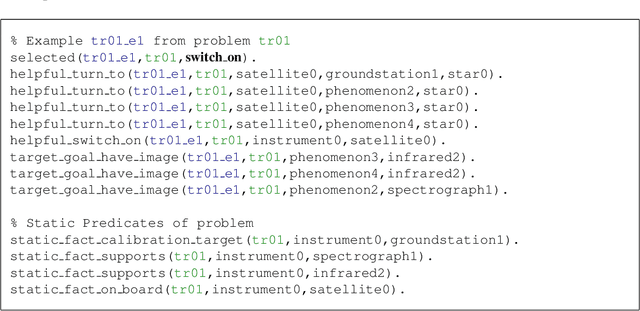

Current evaluation functions for heuristic planning are expensive to compute. In numerous planning problems these functions provide good guidance to the solution, so they are worth the expense. However, when evaluation functions are misguiding or when planning problems are large enough, lots of node evaluations must be computed, which severely limits the scalability of heuristic planners. In this paper, we present a novel solution for reducing node evaluations in heuristic planning based on machine learning. Particularly, we define the task of learning search control for heuristic planning as a relational classification task, and we use an off-the-shelf relational classification tool to address this learning task. Our relational classification task captures the preferred action to select in the different planning contexts of a specific planning domain. These planning contexts are defined by the set of helpful actions of the current state, the goals remaining to be achieved, and the static predicates of the planning task. This paper shows two methods for guiding the search of a heuristic planner with the learned classifiers. The first one consists of using the resulting classifier as an action policy. The second one consists of applying the classifier to generate lookahead states within a Best First Search algorithm. Experiments over a variety of domains reveal that our heuristic planner using the learned classifiers solves larger problems than state-of-the-art planners.