 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoML4ETC: Automated Neural Architecture Search for Real-World Encrypted Traffic Classification
Aug 09, 2023Deep learning (DL) has been successfully applied to encrypted network traffic classification in experimental settings. However, in production use, it has been shown that a DL classifier's performance inevitably decays over time. Re-training the model on newer datasets has been shown to only partially improve its performance. Manually re-tuning the model architecture to meet the performance expectations on newer datasets is time-consuming and requires domain expertise. We propose AutoML4ETC, a novel tool to automatically design efficient and high-performing neural architectures for encrypted traffic classification. We define a novel, powerful search space tailored specifically for the near real-time classification of encrypted traffic using packet header bytes. We show that with different search strategies over our search space, AutoML4ETC generates neural architectures that outperform the state-of-the-art encrypted traffic classifiers on several datasets, including public benchmark datasets and real-world TLS and QUIC traffic collected from the Orange mobile network. In addition to being more accurate, AutoML4ETC's architectures are significantly more efficient and lighter in terms of the number of parameters. Finally, we make AutoML4ETC publicly available for future research.
Generalizable Resource Scaling of 5G Slices using Constrained Reinforcement Learning
Jun 15, 2023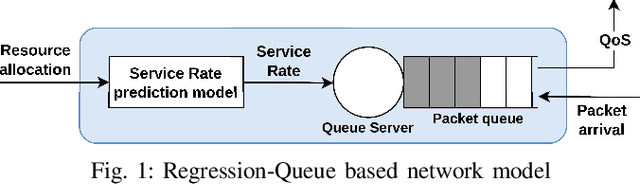
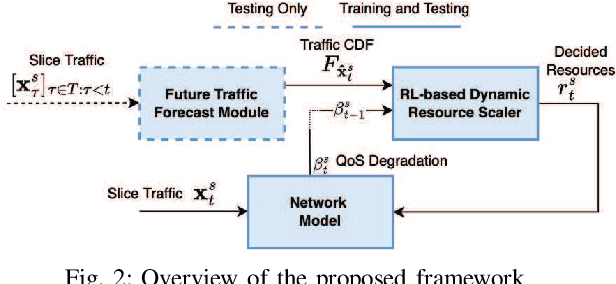
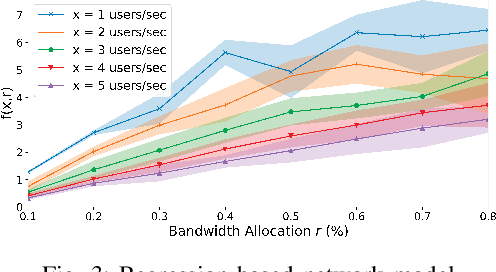
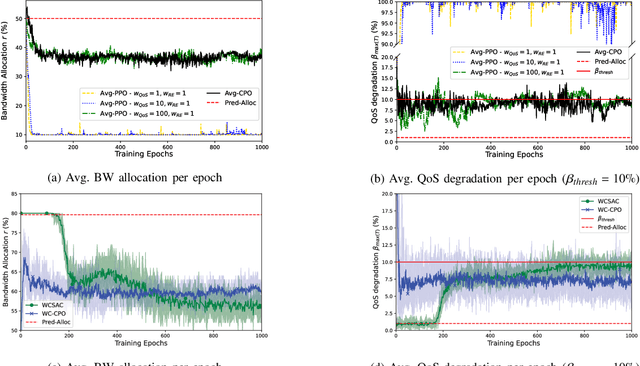
Network slicing is a key enabler for 5G to support various applications. Slices requested by service providers (SPs) have heterogeneous quality of service (QoS) requirements, such as latency, throughput, and jitter. It is imperative that the 5G infrastructure provider (InP) allocates the right amount of resources depending on the slice's traffic, such that the specified QoS levels are maintained during the slice's lifetime while maximizing resource efficiency. However, there is a non-trivial relationship between the QoS and resource allocation. In this paper, this relationship is learned using a regression-based model. We also leverage a risk-constrained reinforcement learning agent that is trained offline using this model and domain randomization for dynamically scaling slice resources while maintaining the desired QoS level. Our novel approach reduces the effects of network modeling errors since it is model-free and does not require QoS metrics to be mathematically formulated in terms of traffic. In addition, it provides robustness against uncertain network conditions, generalizes to different real-world traffic patterns, and caters to various QoS metrics. The results show that the state-of-the-art approaches can lead to QoS degradation as high as 44.5% when tested on previously unseen traffic. On the other hand, our approach maintains the QoS degradation below a preset 10% threshold on such traffic, while minimizing the allocated resources. Additionally, we demonstrate that the proposed approach is robust against varying network conditions and inaccurate traffic predictions.
Vehicle Scheduling Problem
Jan 25, 2020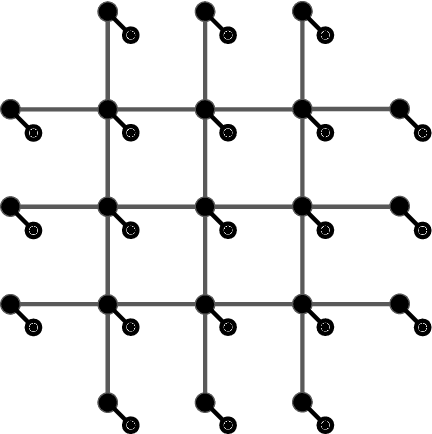
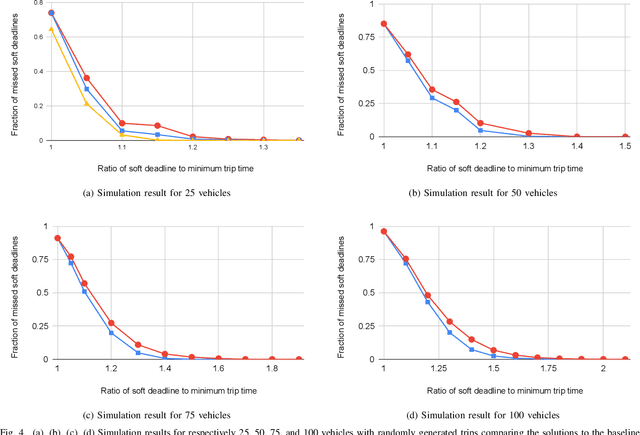
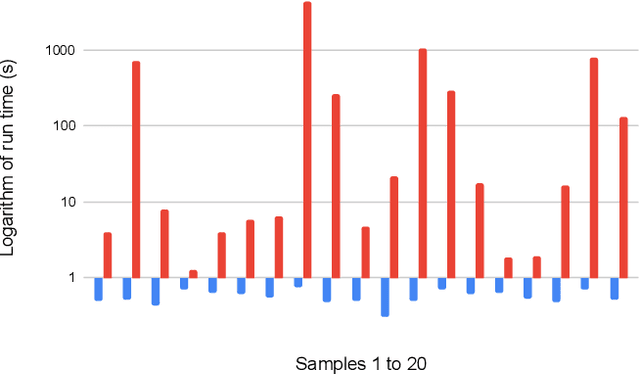
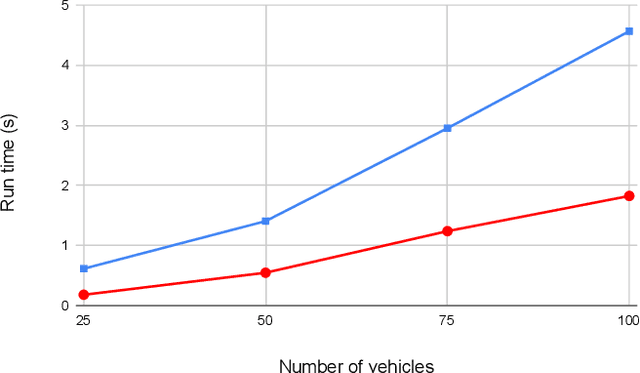
We define a new problem called the Vehicle Scheduling Problem (VSP). The goal is to minimize an objective function, such as the number of tardy vehicles over a transportation network subject to maintaining safety distances, meeting hard deadlines, and maintaining speeds on each link between the allowed minimums and maximums. We prove VSP is an NP-hard problem for multiple objective functions that are commonly used in the context of job shop scheduling. With the number of tardy vehicles as the objective function, we formulate VSP in terms of a Mixed Integer Linear Programming (MIP) and design a heuristic algorithm. We analyze the complexity of our algorithm and compare the quality of the solutions to the optimal solution for the MIP formulation in the small cases. Our main motivation for defining VSP is the upcoming integration of Unmanned Aerial Vehicles (UAVs) into the airspace for which this novel scheduling framework is of paramount importance.
3D traffic flow model for UAVs
Sep 11, 2019
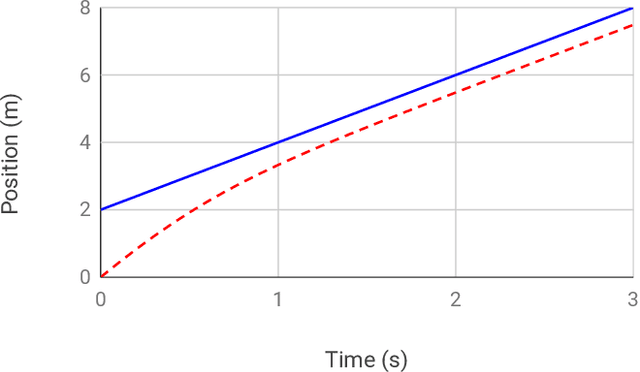
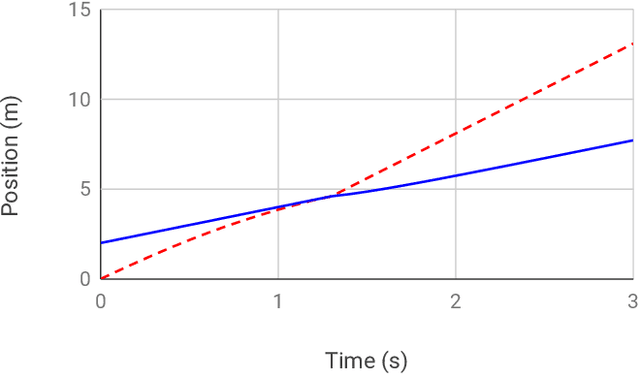
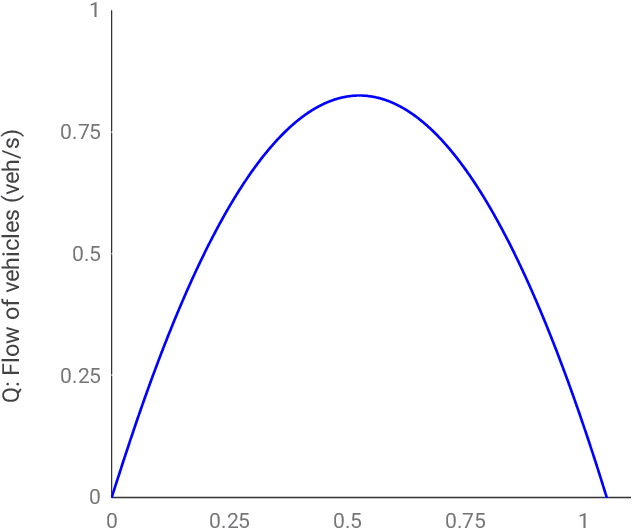
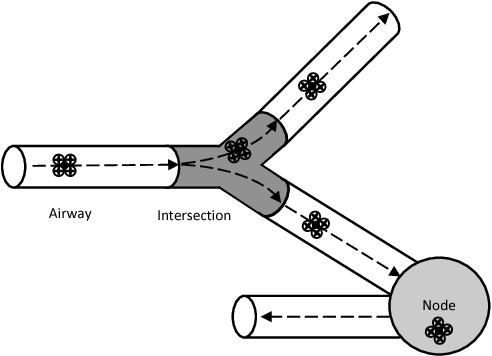
In this work, we introduce a microscopic traffic flow model called Scalar Capacity Model (SCM) which can be used to study the formation of traffic on an airway link for autonomous Unmanned Aerial Vehicles (UAV) as well as for the ground vehicles on the road. Given the 3D nature of UAV flights, the main novelty in our model is to eliminate the commonly used notion of lanes and replace it with a notion of density and capacity of flow, but in such a way that individual vehicle motions can still be modeled. We name this a Density/Capacity View (DCV) of the link capacity and how vehicles utilize it versus the traditional One/Multi-Lane View (OMV). An interesting feature of this model is exhibiting both passing and blocking regimes (analogous to multi-lane or single-lane) depending on the set scalar parameter for capacity. We show the model has linear local (platoon) and string stability. Also, we perform numerical simulations and show evidence for non-linear stability. Our traffic flow model is represented by a nonlinear differential equation which we transform into a linear form. This makes our model analytically solvable in the blocking regime and piece-wise analytically solvable in the passing regime.
A Graph-Based Machine Learning Approach for Bot Detection
Feb 22, 2019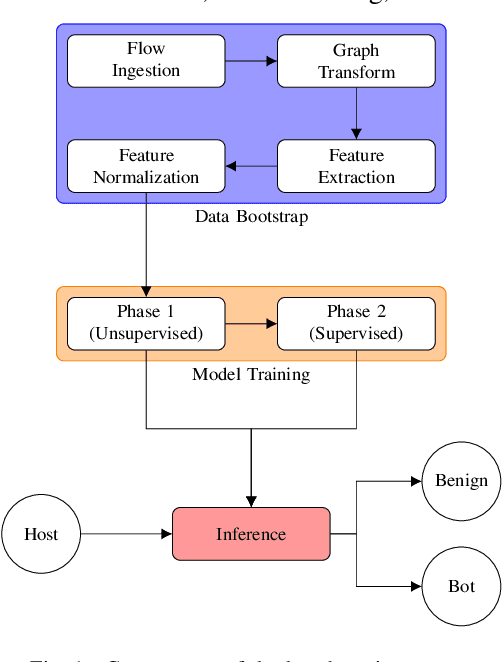
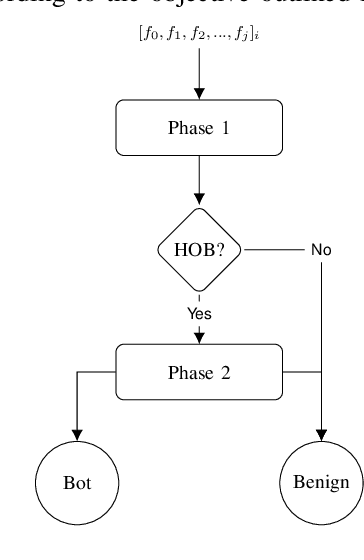
Bot detection using machine learning (ML), with network flow-level features, has been extensively studied in the literature. However, existing flow-based approaches typically incur a high computational overhead and do not completely capture the network communication patterns, which can expose additional aspects of malicious hosts. Recently, bot detection systems which leverage communication graph analysis using ML have gained attention to overcome these limitations. A graph-based approach is rather intuitive, as graphs are true representations of network communications. In this paper, we propose a two-phased, graph-based bot detection system which leverages both unsupervised and supervised ML. The first phase prunes presumable benign hosts, while the second phase achieves bot detection with high precision. Our system detects multiple types of bots and is robust to zero-day attacks. It also accommodates different network topologies and is suitable for large-scale data.
Internet of Drones
Feb 02, 2016
The Internet of Drones (IoD) is a layered network control architecture designed mainly for coordinating the access of unmanned aerial vehicles to controlled airspace, and providing navigation services between locations referred to as nodes. The IoD provides generic services for various drone applications such as package delivery, traffic surveillance, search and rescue and more. In this paper, we present a conceptual model of how such an architecture can be organized and we specify the features that an IoD system based on our architecture should implement. For doing so, we extract key concepts from three existing large scale networks, namely the air traffic control network, the cellular network, and the Internet and explore their connections to our novel architecture for drone traffic management.