 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCluster & Disperse: a general air conflict resolution heuristic using unsupervised learning
Jan 08, 2025We provide a general and malleable heuristic for the air conflict resolution problem. This heuristic is based on a new neighborhood structure for searching the solution space of trajectories and flight-levels. Using unsupervised learning, the core idea of our heuristic is to cluster the conflict points and disperse them in various flight levels. Our first algorithm is called Cluster & Disperse and in each iteration it assigns the most problematic flights in each cluster to another flight-level. In effect, we shuffle them between the flight-levels until we achieve a well-balanced configuration. The Cluster & Disperse algorithm then uses any horizontal plane conflict resolution algorithm as a subroutine to solve these well-balanced instances. Nevertheless, we develop a novel algorithm for the horizontal plane based on a similar idea. That is we cluster and disperse the conflict points spatially in the same flight level using the gradient descent and a social force. We use a novel maneuver making flights travel on an arc instead of a straight path which is based on the aviation routine of the Radius to Fix legs. Our algorithms can handle a high density of flights within a reasonable computation time. We put their performance in context with some notable algorithms from the literature. Being a general framework, a particular strength of the Cluster & Disperse is its malleability in allowing various constraints regarding the aircraft or the environment to be integrated with ease. This is in contrast to the models for instance based on mixed integer programming.
Vehicle Scheduling Problem
Jan 25, 2020
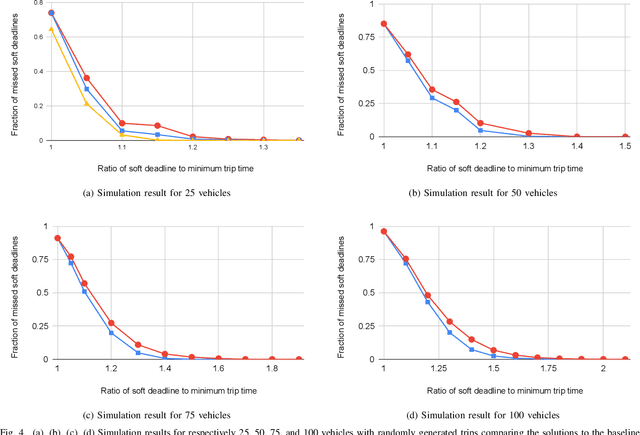
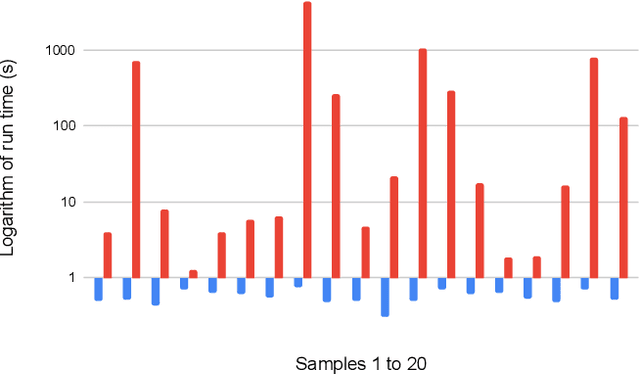
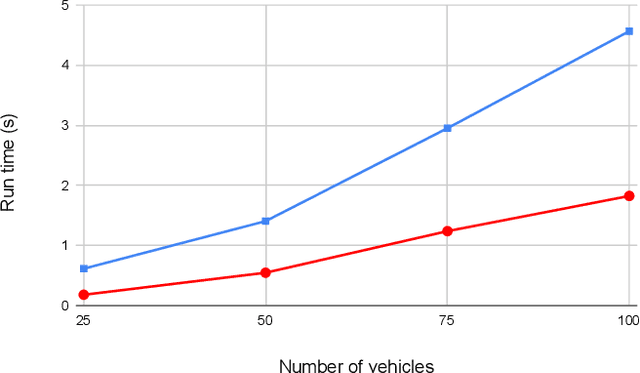
We define a new problem called the Vehicle Scheduling Problem (VSP). The goal is to minimize an objective function, such as the number of tardy vehicles over a transportation network subject to maintaining safety distances, meeting hard deadlines, and maintaining speeds on each link between the allowed minimums and maximums. We prove VSP is an NP-hard problem for multiple objective functions that are commonly used in the context of job shop scheduling. With the number of tardy vehicles as the objective function, we formulate VSP in terms of a Mixed Integer Linear Programming (MIP) and design a heuristic algorithm. We analyze the complexity of our algorithm and compare the quality of the solutions to the optimal solution for the MIP formulation in the small cases. Our main motivation for defining VSP is the upcoming integration of Unmanned Aerial Vehicles (UAVs) into the airspace for which this novel scheduling framework is of paramount importance.
3D traffic flow model for UAVs
Sep 11, 2019
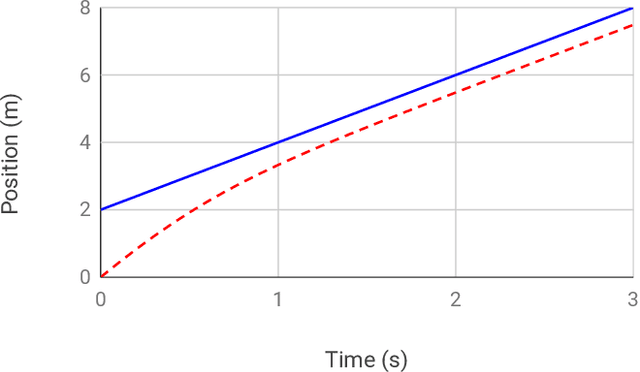
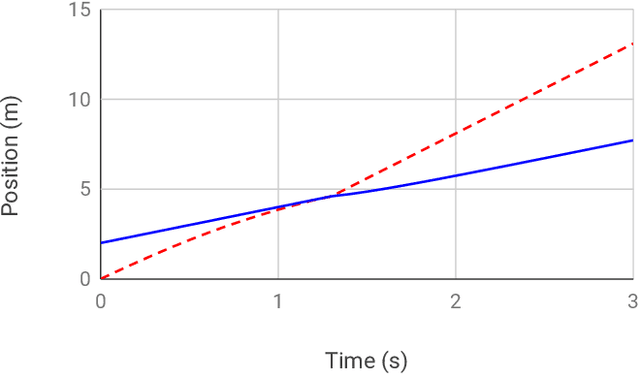
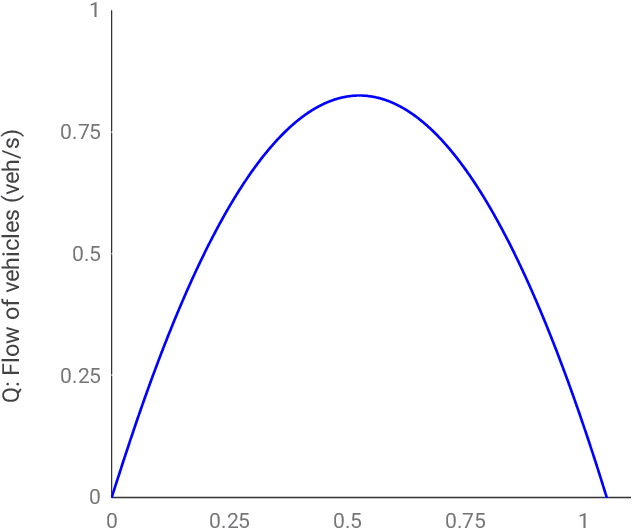
In this work, we introduce a microscopic traffic flow model called Scalar Capacity Model (SCM) which can be used to study the formation of traffic on an airway link for autonomous Unmanned Aerial Vehicles (UAV) as well as for the ground vehicles on the road. Given the 3D nature of UAV flights, the main novelty in our model is to eliminate the commonly used notion of lanes and replace it with a notion of density and capacity of flow, but in such a way that individual vehicle motions can still be modeled. We name this a Density/Capacity View (DCV) of the link capacity and how vehicles utilize it versus the traditional One/Multi-Lane View (OMV). An interesting feature of this model is exhibiting both passing and blocking regimes (analogous to multi-lane or single-lane) depending on the set scalar parameter for capacity. We show the model has linear local (platoon) and string stability. Also, we perform numerical simulations and show evidence for non-linear stability. Our traffic flow model is represented by a nonlinear differential equation which we transform into a linear form. This makes our model analytically solvable in the blocking regime and piece-wise analytically solvable in the passing regime.
Internet of Drones
Feb 02, 2016
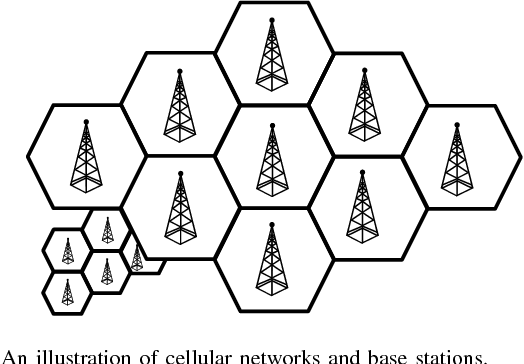
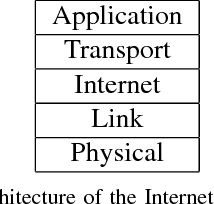
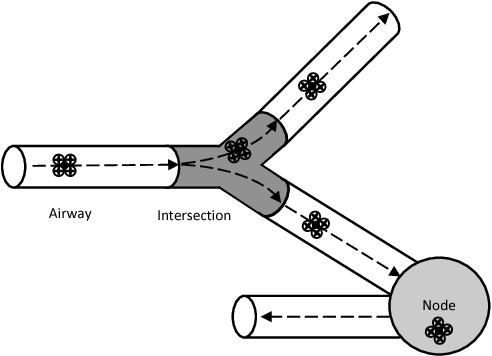
The Internet of Drones (IoD) is a layered network control architecture designed mainly for coordinating the access of unmanned aerial vehicles to controlled airspace, and providing navigation services between locations referred to as nodes. The IoD provides generic services for various drone applications such as package delivery, traffic surveillance, search and rescue and more. In this paper, we present a conceptual model of how such an architecture can be organized and we specify the features that an IoD system based on our architecture should implement. For doing so, we extract key concepts from three existing large scale networks, namely the air traffic control network, the cellular network, and the Internet and explore their connections to our novel architecture for drone traffic management.