 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth-Based Selective Blurring in Stereo Images Using Accelerated Framework
Jan 21, 2020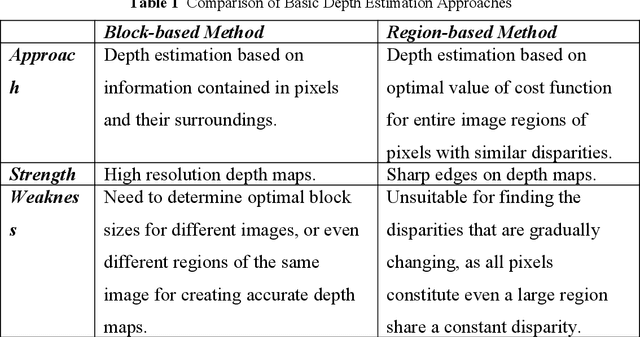
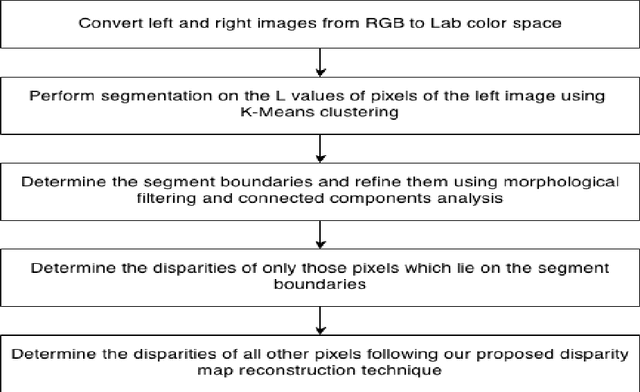

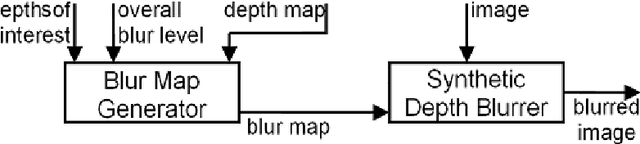
We propose a hybrid method for stereo disparity estimation by combining block and region-based stereo matching approaches. It generates dense depth maps from disparity measurements of only 18 % image pixels (left or right). The methodology involves segmenting pixel lightness values using fast K-Means implementation, refining segment boundaries using morphological filtering and connected components analysis; then determining boundaries' disparities using sum of absolute differences (SAD) cost function. Complete disparity maps are reconstructed from boundaries' disparities. We consider an application of our method for depth-based selective blurring of non-interest regions of stereo images, using Gaussian blur to de-focus users' non-interest regions. Experiments on Middlebury dataset demonstrate that our method outperforms traditional disparity estimation approaches using SAD and normalized cross correlation by up to 33.6 % and some recent methods by up to 6.1 %. Further, our method is highly parallelizable using CPU and GPU framework based on Java Thread Pool and APARAPI with speed-up of 5.8 for 250 stereo video frames (4,096 x 2,304).
* arXiv admin note: text overlap with arXiv:2001.06967
A hybrid algorithm for disparity calculation from sparse disparity estimates based on stereo vision
Jan 20, 2020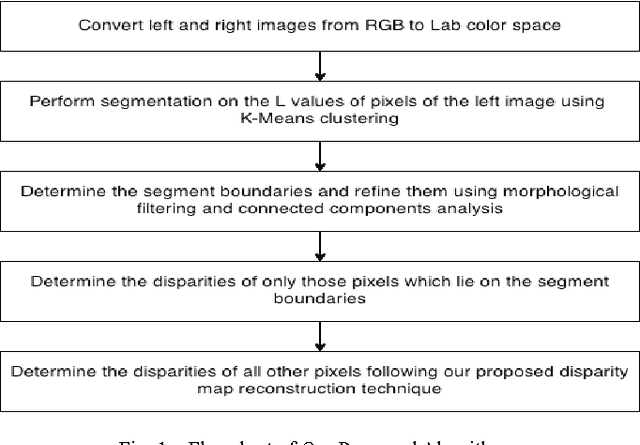


In this paper, we have proposed a novel method for stereo disparity estimation by combining the existing methods of block based and region based stereo matching. Our method can generate dense disparity maps from disparity measurements of only 18% pixels of either the left or the right image of a stereo image pair. It works by segmenting the lightness values of image pixels using a fast implementation of K-Means clustering. It then refines those segment boundaries by morphological filtering and connected components analysis, thus removing a lot of redundant boundary pixels. This is followed by determining the boundaries' disparities by the SAD cost function. Lastly, we reconstruct the entire disparity map of the scene from the boundaries' disparities through disparity propagation along the scan lines and disparity prediction of regions of uncertainty by considering disparities of the neighboring regions. Experimental results on the Middlebury stereo vision dataset demonstrate that the proposed method outperforms traditional disparity determination methods like SAD and NCC by up to 30% and achieves an improvement of 2.6% when compared to a recent approach based on absolute difference (AD) cost function for disparity calculations [1].
Entropy-difference based stereo error detection
Nov 28, 2017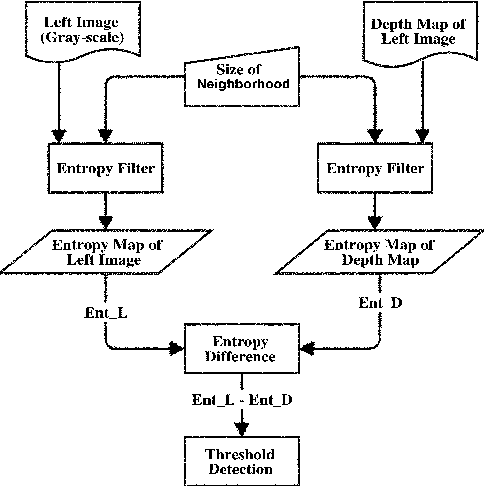
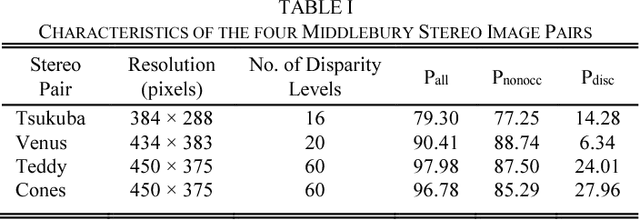

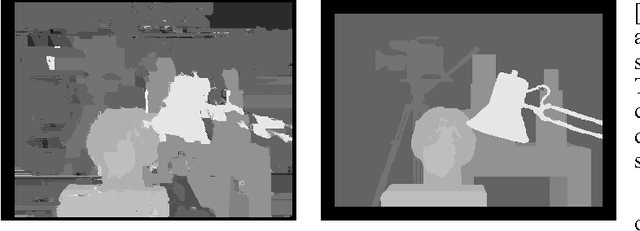
Stereo depth estimation is error-prone; hence, effective error detection methods are desirable. Most such existing methods depend on characteristics of the stereo matching cost curve, making them unduly dependent on functional details of the matching algorithm. As a remedy, we propose a novel error detection approach based solely on the input image and its depth map. Our assumption is that, entropy of any point on an image will be significantly higher than the entropy of its corresponding point on the image's depth map. In this paper, we propose a confidence measure, Entropy-Difference (ED) for stereo depth estimates and a binary classification method to identify incorrect depths. Experiments on the Middlebury dataset show the effectiveness of our method. Our proposed stereo confidence measure outperforms 17 existing measures in all aspects except occlusion detection. Established metrics such as precision, accuracy, recall, and area-under-curve are used to demonstrate the effectiveness of our method.