 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth-Based Selective Blurring in Stereo Images Using Accelerated Framework
Paper and Code
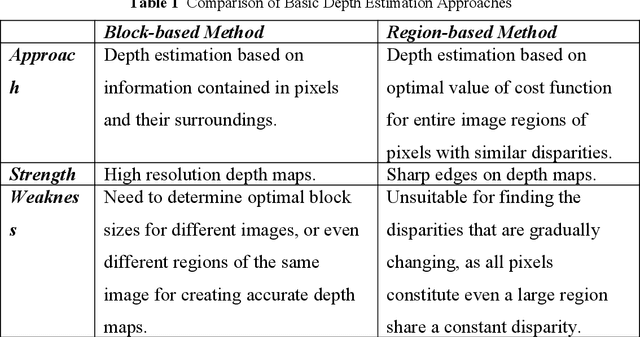
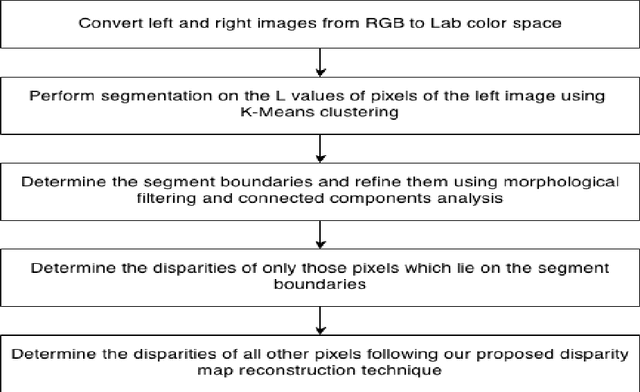

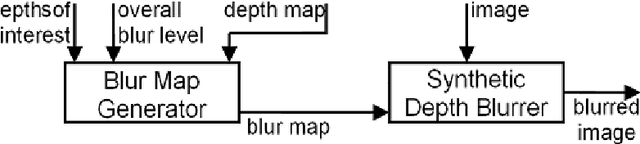
We propose a hybrid method for stereo disparity estimation by combining block and region-based stereo matching approaches. It generates dense depth maps from disparity measurements of only 18 % image pixels (left or right). The methodology involves segmenting pixel lightness values using fast K-Means implementation, refining segment boundaries using morphological filtering and connected components analysis; then determining boundaries' disparities using sum of absolute differences (SAD) cost function. Complete disparity maps are reconstructed from boundaries' disparities. We consider an application of our method for depth-based selective blurring of non-interest regions of stereo images, using Gaussian blur to de-focus users' non-interest regions. Experiments on Middlebury dataset demonstrate that our method outperforms traditional disparity estimation approaches using SAD and normalized cross correlation by up to 33.6 % and some recent methods by up to 6.1 %. Further, our method is highly parallelizable using CPU and GPU framework based on Java Thread Pool and APARAPI with speed-up of 5.8 for 250 stereo video frames (4,096 x 2,304).