 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAmbient awareness for agricultural robotic vehicles
Apr 12, 2021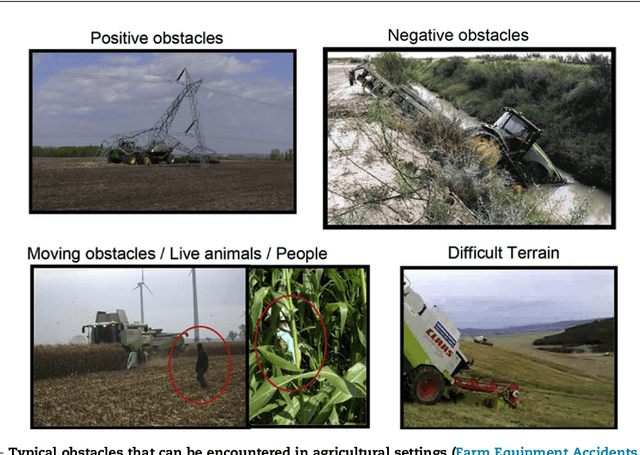
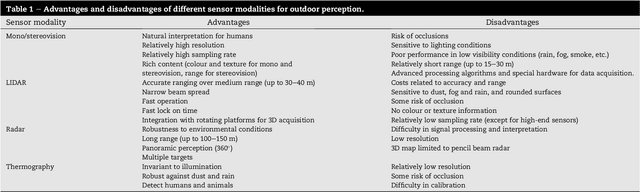

In the last few years, robotic technology has been increasingly employed in agriculture to develop intelligent vehicles that can improve productivity and competitiveness. Accurate and robust environmental perception is a critical requirement to address unsolved issues including safe interaction with field workers and animals, obstacle detection in controlled traffic applications, crop row guidance, surveying for variable rate applications, and situation awareness, in general, towards increased process automation. Given the variety of conditions thatmay be encountered in the field, no single sensor exists that can guarantee reliable results in every scenario. The development of a multi-sensory perception systemto increase the ambient awareness of an agricultural vehicle operating in crop fields is the objective of the Ambient Awareness for Autonomous Agricultural Vehicles (QUAD-AV) project. Different onboard sensor technologies, namely stereovision, LIDAR, radar, and thermography, are considered. Novel methods for their combination are proposed to automatically detect obstacles and discern traversable from non-traversable areas. Experimental results, obtained in agricultural contexts, are presented showing the effectiveness of the proposed methods.
3D mapping for multi hybrid robot cooperation
Apr 08, 2019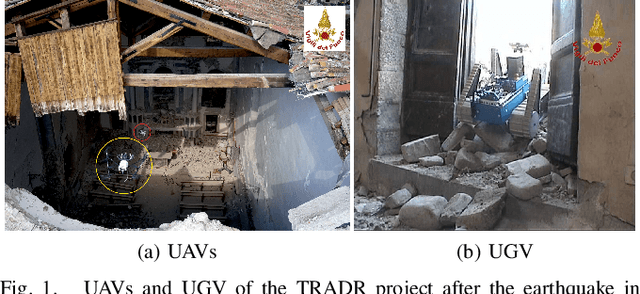
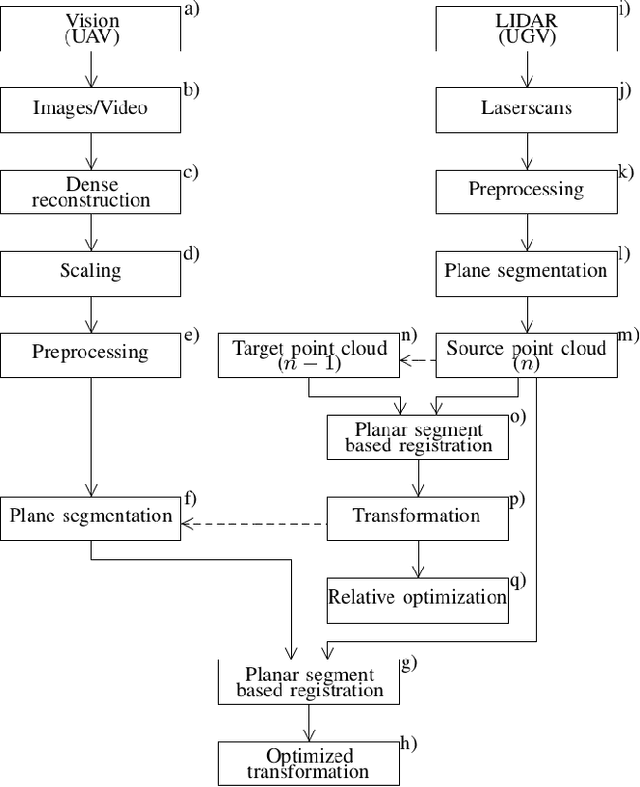
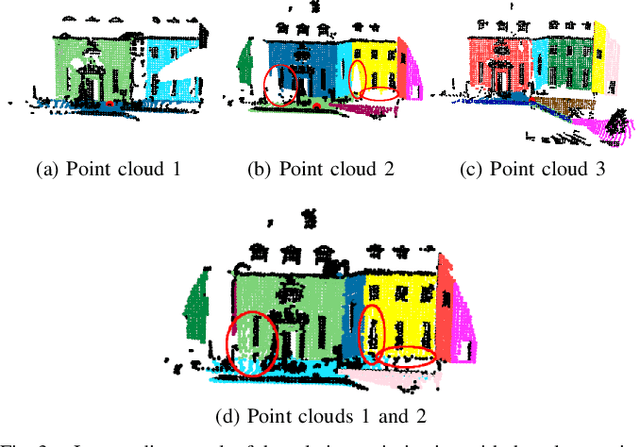
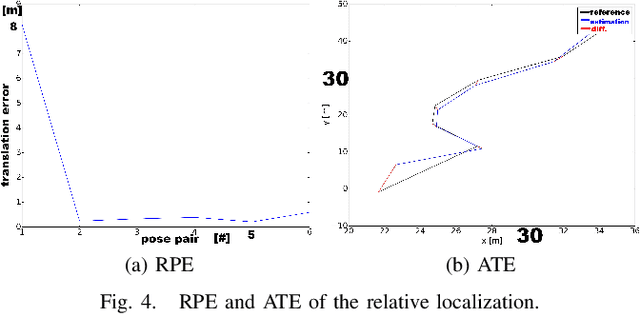
This paper presents a novel approach to build consistent 3D maps for multi robot cooperation in USAR environments. The sensor streams from unmanned aerial vehicles (UAVs) and ground robots (UGV) are fused in one consistent map. The UAV camera data are used to generate 3D point clouds that are fused with the 3D point clouds generated by a rolling 2D laser scanner at the UGV. The registration method is based on the matching of corresponding planar segments that are extracted from the point clouds. Based on the registration, an approach for a globally optimized localization is presented. Apart from the structural information of the point clouds, it is important to mention that no further information is required for the localization. Two examples show the performance of the overall registration.