 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRay-Tracing Calibration from Channel Sounding Measurements in a Millimeter-Wave Industrial Scenario
Apr 16, 2024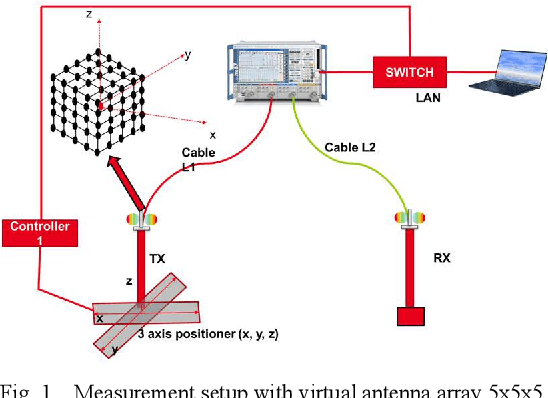
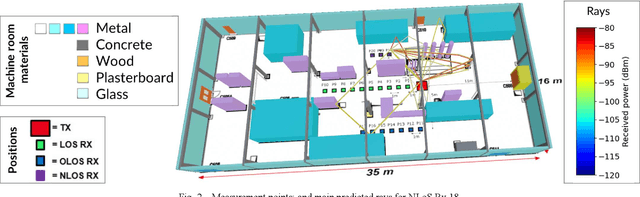
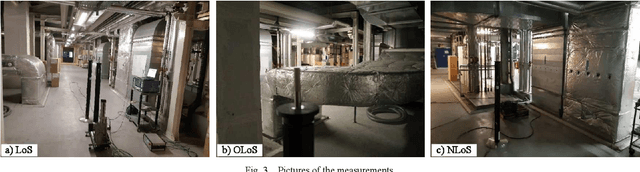
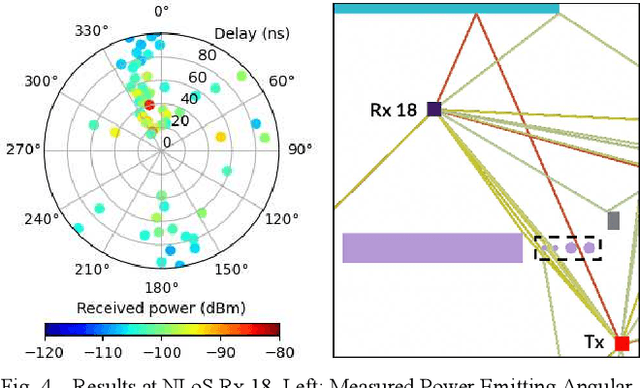
New-generation communication and sensing systems are gaining strong interest in the context of Industry 4.0 e.g., related to mapping techniques, environmental sensing, automation or hyper-vision. The radio propagation in confined, cluttered and heavily metalized factory environments is a critical challenge; thus an evaluation by accurate propagation channel models is necessary. Site-specific channel emulation can be obtained from Ray-tracing (RT); but RT validation for factory environments is still an on-going work. For this purpose, a measurement campaign was performed in a machine room with many metallic objects and machines, using a mmWave channel sounder. Wideband channel responses were collected and compared to RT simulations. The RT prediction tool was calibrated to minimize the error observed on some large scale statistics, thus reaching a very good agreement between the simulation and the measurement. Average error in received power, delay spread and azimuth spread is below 1.5 dB, 5 ns and 2{\deg} respectively.
Radio SLAM for 6G Systems at THz Frequencies: Design and Experimental Validation
Dec 23, 2022



Next-generation wireless networks will see the convergence of communication and sensing, also exploiting the availability of large bandwidths in the Terahertz (THz) spectrum and electrically large antenna arrays on handheld devices. In particular, it is envisaged that user devices will be able to automatically scan their surroundings by steering a very narrow antenna beam and collecting echoes reflected by objects and walls to derive a map of indoors and infer users' trajectories using simultaneous localization and mapping (SLAM) techniques. In this paper, we address this scenario by proposing original radioSLAM (R-SLAM) algorithms, derived from image processing techniques, to map the environment and pinpoint the device position in the map starting from measurements sensed by a mobile THz radar. Initially, to fully understand the THz backscattering phenomenon, we provide an experimental characterization of the THz backscattering channel in indoor environments. Then, the performance of the proposed algorithms is assessed using real-world THz radar measurements and is compared with state-of-the-art SLAM techniques, demonstrating the superiority of the proposed approaches.
Automatic Mapping of the Indoor World with Personal Radars
Oct 28, 2019

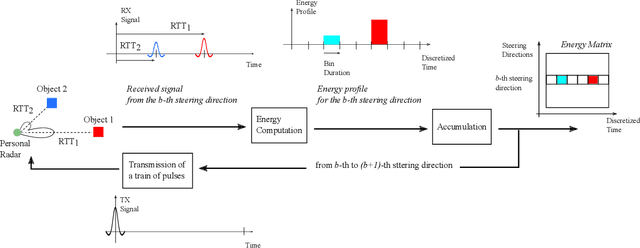
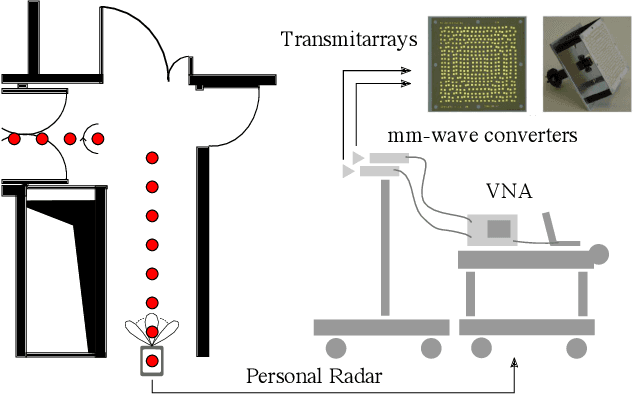
Digital maps will revolutionize our experience of perceiving and navigating indoor environments. While today we rely only on the representation of the outdoors, the mapping of indoors is mainly a part of the traditional SLAM problem where robots discover the surrounding and perform self-localization. Nonetheless, robot deployment prevents from a large diffusion and fast mapping of indoors and, further, they are usually equipped with laser and vision technology that fail in scarce visibility conditions. To this end, a possible solution is to turn future personal devices into personal radars as a milestone towards the automatic generation of indoor maps using massive array technology at millimeter-waves, already in place for communications. In this application-oriented paper, we will describe the main achievements attained so far to develop the personal radar concept, using ad-hoc collected experimental data, and by discussing possible future directions of investigation.