 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Signature Verification based on the Lagrange formulation with 2D and 3D robotic models
Mar 17, 2025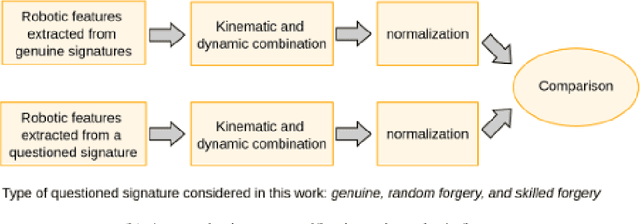
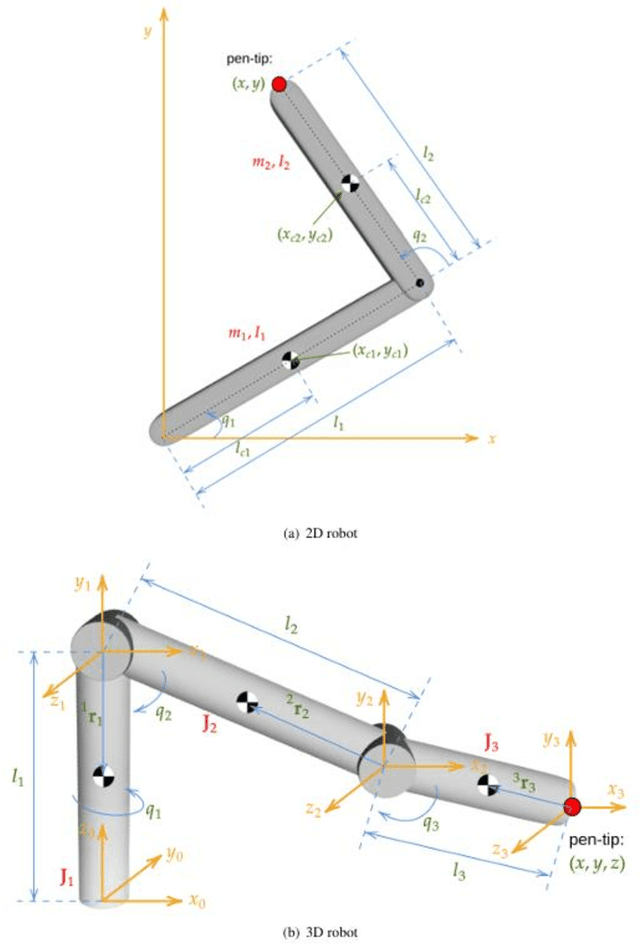
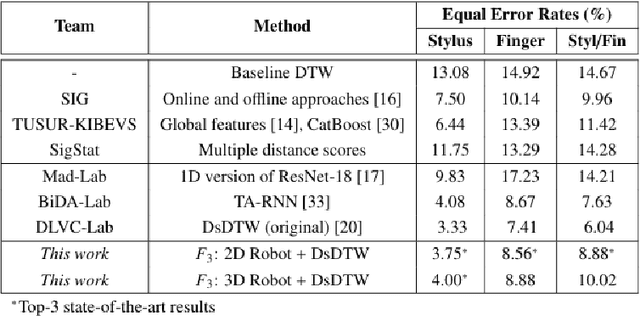
Online Signature Verification commonly relies on function-based features, such as time-sampled horizontal and vertical coordinates, as well as the pressure exerted by the writer, obtained through a digitizer. Although inferring additional information about the writers arm pose, kinematics, and dynamics based on digitizer data can be useful, it constitutes a challenge. In this paper, we tackle this challenge by proposing a new set of features based on the dynamics of online signatures. These new features are inferred through a Lagrangian formulation, obtaining the sequences of generalized coordinates and torques for 2D and 3D robotic arm models. By combining kinematic and dynamic robotic features, our results demonstrate their significant effectiveness for online automatic signature verification and achieving state-of-the-art results when integrated into deep learning models.