 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkyeye Team at MBZIRC 2020: A team of aerial and ground robots for GPS-denied autonomous fire extinguishing in an urban building scenario
Apr 05, 2021

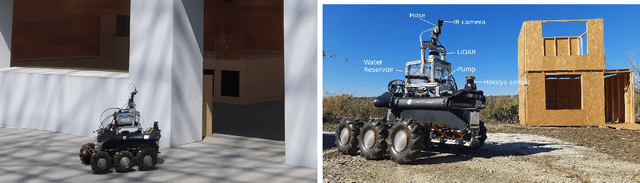
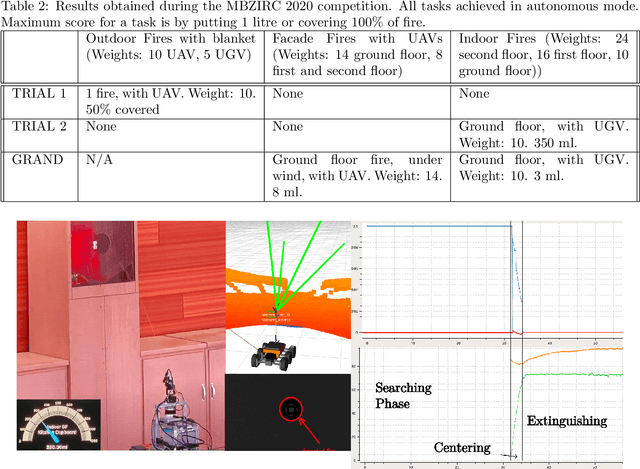
The paper presents a presents a framework for fire extinguishing in an urban scenario by a team of aerial and ground robots. The system was developed for the Challenge 3 of the 2020 Mohamed Bin Zayed International Robotics Challenge (MBZIRC). The challenge required to autonomously detect, locate and extinguish fires in different floors of a building, as well as in the surroundings. The multi-robot system developed consists of a heterogeneous robot team of up to three Unmanned Aerial Vehicles (UAV) and one Unmanned Ground Vehicle (UGV). The paper describes the main hardware and software components for UAV and UGV platforms. It also presents the main algorithmic components of the system: a 3D LIDAR-based mapping and localization module able to work in GPS-denied scenarios; a global planner and a fast local re-planning system for robot navigation; infrared-based perception and robot actuation control for fire extinguishing; and a mission executive and coordination module based on Behavior Trees. The paper finally describes the results obtained during competition, where the system worked fully autonomously and scored in all the trials performed. The system contributed to the third place achieved by the Skyeye team in the Grand Challenge of MBZIRC 2020.