 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Re-ranking Method using K-nearest Weighted Fusion for Person Re-identification
Sep 04, 2025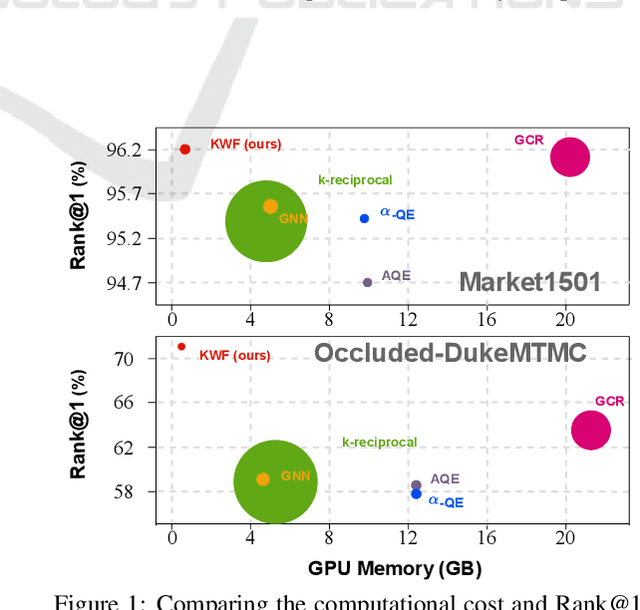
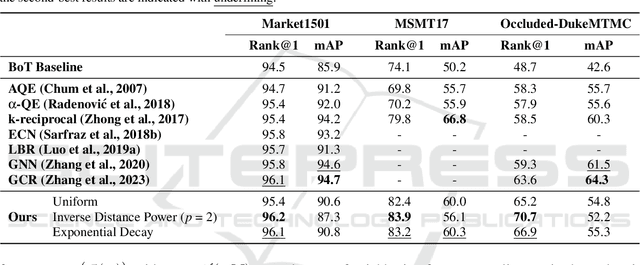
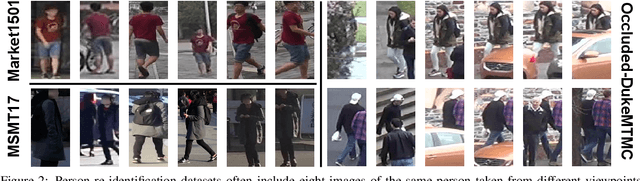
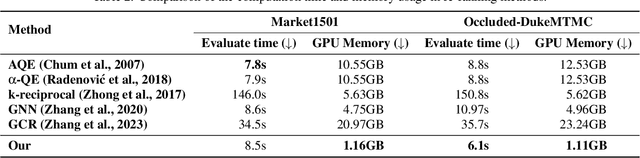
In person re-identification, re-ranking is a crucial step to enhance the overall accuracy by refining the initial ranking of retrieved results. Previous studies have mainly focused on features from single-view images, which can cause view bias and issues like pose variation, viewpoint changes, and occlusions. Using multi-view features to present a person can help reduce view bias. In this work, we present an efficient re-ranking method that generates multi-view features by aggregating neighbors' features using K-nearest Weighted Fusion (KWF) method. Specifically, we hypothesize that features extracted from re-identification models are highly similar when representing the same identity. Thus, we select K neighboring features in an unsupervised manner to generate multi-view features. Additionally, this study explores the weight selection strategies during feature aggregation, allowing us to identify an effective strategy. Our re-ranking approach does not require model fine-tuning or extra annotations, making it applicable to large-scale datasets. We evaluate our method on the person re-identification datasets Market1501, MSMT17, and Occluded-DukeMTMC. The results show that our method significantly improves Rank@1 and mAP when re-ranking the top M candidates from the initial ranking results. Specifically, compared to the initial results, our re-ranking method achieves improvements of 9.8%/22.0% in Rank@1 on the challenging datasets: MSMT17 and Occluded-DukeMTMC, respectively. Furthermore, our approach demonstrates substantial enhancements in computational efficiency compared to other re-ranking methods.
* Published in ICPRAM 2025, ISBN 978-989-758-730-6, ISSN 2184-4313
TriLiteNet: Lightweight Model for Multi-Task Visual Perception
Sep 04, 2025Efficient perception models are essential for Advanced Driver Assistance Systems (ADAS), as these applications require rapid processing and response to ensure safety and effectiveness in real-world environments. To address the real-time execution needs of such perception models, this study introduces the TriLiteNet model. This model can simultaneously manage multiple tasks related to panoramic driving perception. TriLiteNet is designed to optimize performance while maintaining low computational costs. Experimental results on the BDD100k dataset demonstrate that the model achieves competitive performance across three key tasks: vehicle detection, drivable area segmentation, and lane line segmentation. Specifically, the TriLiteNet_{base} demonstrated a recall of 85.6% for vehicle detection, a mean Intersection over Union (mIoU) of 92.4% for drivable area segmentation, and an Acc of 82.3% for lane line segmentation with only 2.35M parameters and a computational cost of 7.72 GFLOPs. Our proposed model includes a tiny configuration with just 0.14M parameters, which provides a multi-task solution with minimal computational demand. Evaluated for latency and power consumption on embedded devices, TriLiteNet in both configurations shows low latency and reasonable power during inference. By balancing performance, computational efficiency, and scalability, TriLiteNet offers a practical and deployable solution for real-world autonomous driving applications. Code is available at https://github.com/chequanghuy/TriLiteNet.
FaR: Enhancing Multi-Concept Text-to-Image Diffusion via Concept Fusion and Localized Refinement
Apr 04, 2025Generating multiple new concepts remains a challenging problem in the text-to-image task. Current methods often overfit when trained on a small number of samples and struggle with attribute leakage, particularly for class-similar subjects (e.g., two specific dogs). In this paper, we introduce Fuse-and-Refine (FaR), a novel approach that tackles these challenges through two key contributions: Concept Fusion technique and Localized Refinement loss function. Concept Fusion systematically augments the training data by separating reference subjects from backgrounds and recombining them into composite images to increase diversity. This augmentation technique tackles the overfitting problem by mitigating the narrow distribution of the limited training samples. In addition, Localized Refinement loss function is introduced to preserve subject representative attributes by aligning each concept's attention map to its correct region. This approach effectively prevents attribute leakage by ensuring that the diffusion model distinguishes similar subjects without mixing their attention maps during the denoising process. By fine-tuning specific modules at the same time, FaR balances the learning of new concepts with the retention of previously learned knowledge. Empirical results show that FaR not only prevents overfitting and attribute leakage while maintaining photorealism, but also outperforms other state-of-the-art methods.
Enhanced Generative Data Augmentation for Semantic Segmentation via Stronger Guidance
Sep 09, 2024Data augmentation is a widely used technique for creating training data for tasks that require labeled data, such as semantic segmentation. This method benefits pixel-wise annotation tasks requiring much effort and intensive labor. Traditional data augmentation methods involve simple transformations like rotations and flips to create new images from existing ones. However, these new images may lack diversity along the main semantic axes in the data and not change high-level semantic properties. To address this issue, generative models have emerged as an effective solution for augmenting data by generating synthetic images. Controllable generative models offer a way to augment data for semantic segmentation tasks using a prompt and visual reference from the original image. However, using these models directly presents challenges, such as creating an effective prompt and visual reference to generate a synthetic image that accurately reflects the content and structure of the original. In this work, we introduce an effective data augmentation method for semantic segmentation using the Controllable Diffusion Model. Our proposed method includes efficient prompt generation using Class-Prompt Appending and Visual Prior Combination to enhance attention to labeled classes in real images. These techniques allow us to generate images that accurately depict segmented classes in the real image. In addition, we employ the class balancing algorithm to ensure efficiency when merging the synthetic and original images to generate balanced data for the training dataset. We evaluated our method on the PASCAL VOC datasets and found it highly effective for synthesizing images in semantic segmentation.
Enhancing Person Re-Identification via Uncertainty Feature Fusion and Wise Distance Aggregation
May 02, 2024The quest for robust Person re-identification (Re-ID) systems capable of accurately identifying subjects across diverse scenarios remains a formidable challenge in surveillance and security applications. This study presents a novel methodology that significantly enhances Person Re-Identification (Re-ID) by integrating Uncertainty Feature Fusion (UFFM) with Wise Distance Aggregation (WDA). Tested on benchmark datasets - Market-1501, DukeMTMC-ReID, and MSMT17 - our approach demonstrates substantial improvements in Rank-1 accuracy and mean Average Precision (mAP). Specifically, UFFM capitalizes on the power of feature synthesis from multiple images to overcome the limitations imposed by the variability of subject appearances across different views. WDA further refines the process by intelligently aggregating similarity metrics, thereby enhancing the system's ability to discern subtle but critical differences between subjects. The empirical results affirm the superiority of our method over existing approaches, achieving new performance benchmarks across all evaluated datasets. Code is available on Github.
TwinLiteNetPlus: A Stronger Model for Real-time Drivable Area and Lane Segmentation
Mar 25, 2024Semantic segmentation is crucial for autonomous driving, particularly for Drivable Area and Lane Segmentation, ensuring safety and navigation. To address the high computational costs of current state-of-the-art (SOTA) models, this paper introduces TwinLiteNetPlus (TwinLiteNet$^+$), a model adept at balancing efficiency and accuracy. TwinLiteNet$^+$ incorporates standard and depth-wise separable dilated convolutions, reducing complexity while maintaining high accuracy. It is available in four configurations, from the robust 1.94 million-parameter TwinLiteNet$^+_{\text{Large}}$ to the ultra-compact 34K-parameter TwinLiteNet$^+_{\text{Nano}}$. Notably, TwinLiteNet$^+_{\text{Large}}$ attains a 92.9\% mIoU for Drivable Area Segmentation and a 34.2\% IoU for Lane Segmentation. These results notably outperform those of current SOTA models while requiring a computational cost that is approximately 11 times lower in terms of Floating Point Operations (FLOPs) compared to the existing SOTA model. Extensively tested on various embedded devices, TwinLiteNet$^+$ demonstrates promising latency and power efficiency, underscoring its suitability for real-world autonomous vehicle applications.