 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnatomical Attention Alignment representation for Radiology Report Generation
May 12, 2025Automated Radiology report generation (RRG) aims at producing detailed descriptions of medical images, reducing radiologists' workload and improving access to high-quality diagnostic services. Existing encoder-decoder models only rely on visual features extracted from raw input images, which can limit the understanding of spatial structures and semantic relationships, often resulting in suboptimal text generation. To address this, we propose Anatomical Attention Alignment Network (A3Net), a framework that enhance visual-textual understanding by constructing hyper-visual representations. Our approach integrates a knowledge dictionary of anatomical structures with patch-level visual features, enabling the model to effectively associate image regions with their corresponding anatomical entities. This structured representation improves semantic reasoning, interpretability, and cross-modal alignment, ultimately enhancing the accuracy and clinical relevance of generated reports. Experimental results on IU X-Ray and MIMIC-CXR datasets demonstrate that A3Net significantly improves both visual perception and text generation quality. Our code is available at \href{https://github.com/Vinh-AI/A3Net}{GitHub}.
Rethinking Top Probability from Multi-view for Distracted Driver Behaviour Localization
Nov 19, 2024



Naturalistic driving action localization task aims to recognize and comprehend human behaviors and actions from video data captured during real-world driving scenarios. Previous studies have shown great action localization performance by applying a recognition model followed by probability-based post-processing. Nevertheless, the probabilities provided by the recognition model frequently contain confused information causing challenge for post-processing. In this work, we adopt an action recognition model based on self-supervise learning to detect distracted activities and give potential action probabilities. Subsequently, a constraint ensemble strategy takes advantages of multi-camera views to provide robust predictions. Finally, we introduce a conditional post-processing operation to locate distracted behaviours and action temporal boundaries precisely. Experimenting on test set A2, our method obtains the sixth position on the public leaderboard of track 3 of the 2024 AI City Challenge.
Polyp-SES: Automatic Polyp Segmentation with Self-Enriched Semantic Model
Oct 02, 2024Automatic polyp segmentation is crucial for effective diagnosis and treatment in colonoscopy images. Traditional methods encounter significant challenges in accurately delineating polyps due to limitations in feature representation and the handling of variability in polyp appearance. Deep learning techniques, including CNN and Transformer-based methods, have been explored to improve polyp segmentation accuracy. However, existing approaches often neglect additional semantics, restricting their ability to acquire adequate contexts of polyps in colonoscopy images. In this paper, we propose an innovative method named ``Automatic Polyp Segmentation with Self-Enriched Semantic Model'' to address these limitations. First, we extract a sequence of features from an input image and decode high-level features to generate an initial segmentation mask. Using the proposed self-enriched semantic module, we query potential semantics and augment deep features with additional semantics, thereby aiding the model in understanding context more effectively. Extensive experiments show superior segmentation performance of the proposed method against state-of-the-art polyp segmentation baselines across five polyp benchmarks in both superior learning and generalization capabilities.
Adaptation of Distinct Semantics for Uncertain Areas in Polyp Segmentation
May 13, 2024

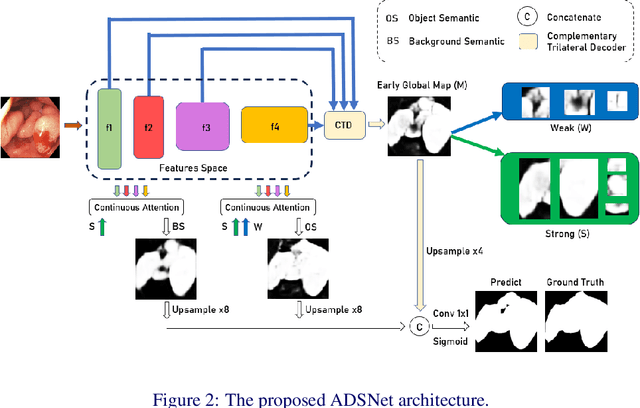

Colonoscopy is a common and practical method for detecting and treating polyps. Segmenting polyps from colonoscopy image is useful for diagnosis and surgery progress. Nevertheless, achieving excellent segmentation performance is still difficult because of polyp characteristics like shape, color, condition, and obvious non-distinction from the surrounding context. This work presents a new novel architecture namely Adaptation of Distinct Semantics for Uncertain Areas in Polyp Segmentation (ADSNet), which modifies misclassified details and recovers weak features having the ability to vanish and not be detected at the final stage. The architecture consists of a complementary trilateral decoder to produce an early global map. A continuous attention module modifies semantics of high-level features to analyze two separate semantics of the early global map. The suggested method is experienced on polyp benchmarks in learning ability and generalization ability, experimental results demonstrate the great correction and recovery ability leading to better segmentation performance compared to the other state of the art in the polyp image segmentation task. Especially, the proposed architecture could be experimented flexibly for other CNN-based encoders, Transformer-based encoders, and decoder backbones.