 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Active Learning for Remote Sensing Object Detection
Mar 17, 2020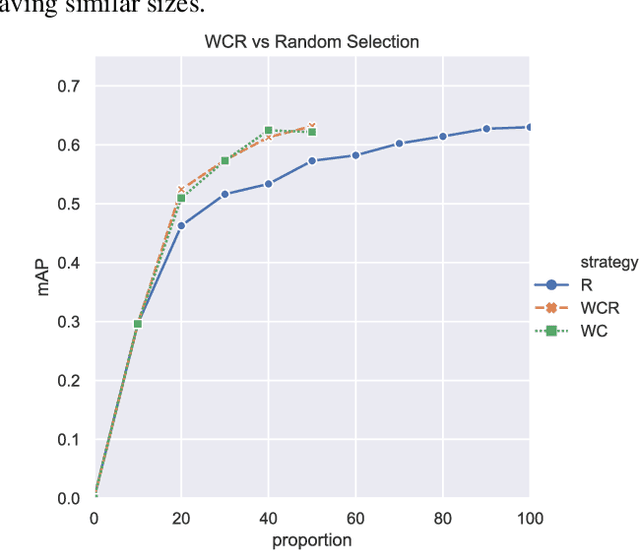
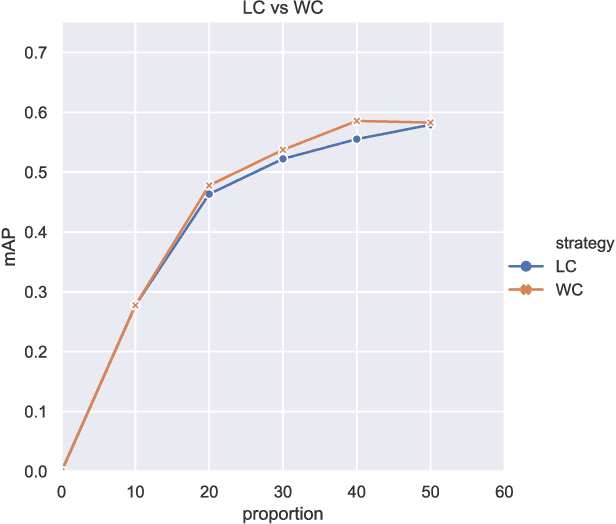
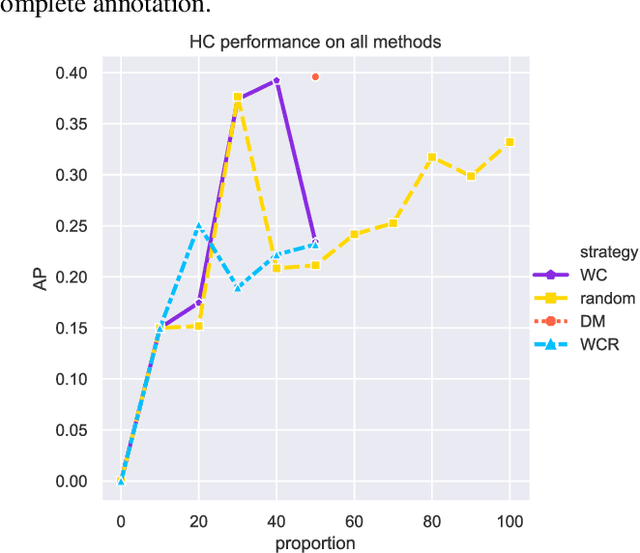
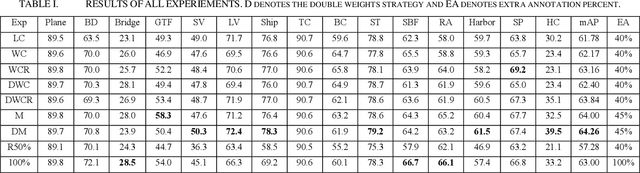
Recently, CNN object detectors have achieved high accuracy on remote sensing images but require huge labor and time costs on annotation. In this paper, we propose a new uncertainty-based active learning which can select images with more information for annotation and detector can still reach high performance with a fraction of the training images. Our method not only analyzes objects' classification uncertainty to find least confident objects but also considers their regression uncertainty to declare outliers. Besides, we bring out two extra weights to overcome two difficulties in remote sensing datasets, class-imbalance and difference in images' objects amount. We experiment our active learning algorithm on DOTA dataset with CenterNet as object detector. We achieve same-level performance as full supervision with only half images. We even override full supervision with 55% images and augmented weights on least confident images.
PartsNet: A Unified Deep Network for Automotive Engine Precision Parts Defect Detection
Oct 29, 2018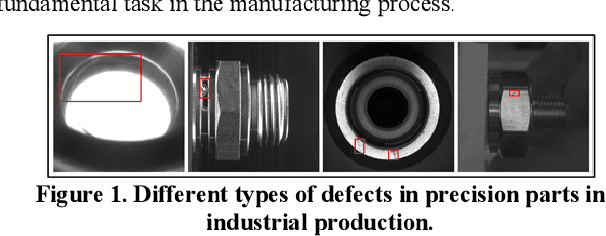
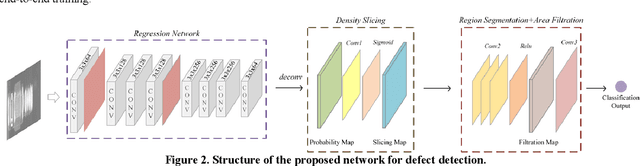

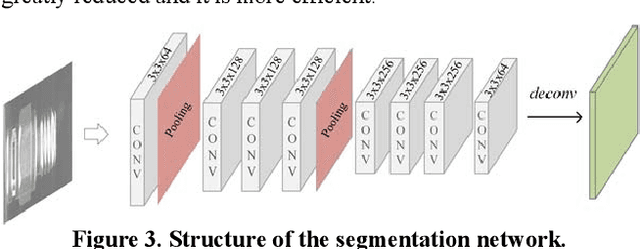
Defect detection is a basic and essential task in automatic parts production, especially for automotive engine precision parts. In this paper, we propose a new idea to construct a deep convolutional network combining related knowledge of feature processing and the representation ability of deep learning. Our algorithm consists of a pixel-wise segmentation Deep Neural Network (DNN) and a feature refining network. The fully convolutional DNN is presented to learn basic features of parts defects. After that, several typical traditional methods which are used to refine the segmentation results are transformed into convolutional manners and integrated. We assemble these methods as a shallow network with fixed weights and empirical thresholds. These thresholds are then released to enhance its adaptation ability and realize end-to-end training. Testing results on different datasets show that the proposed method has good portability and outperforms the state-of-the-art algorithms.