 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull Transformer Framework for Robust Point Cloud Registration with Deep Information Interaction
Dec 17, 2021
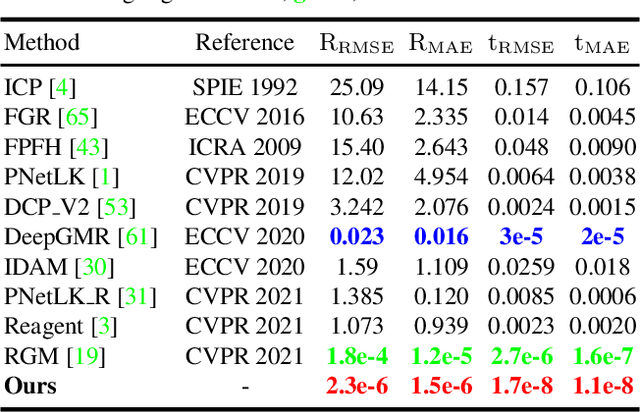
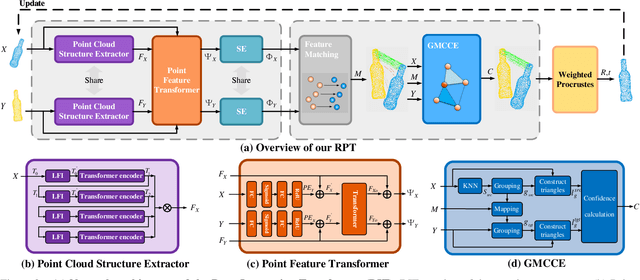
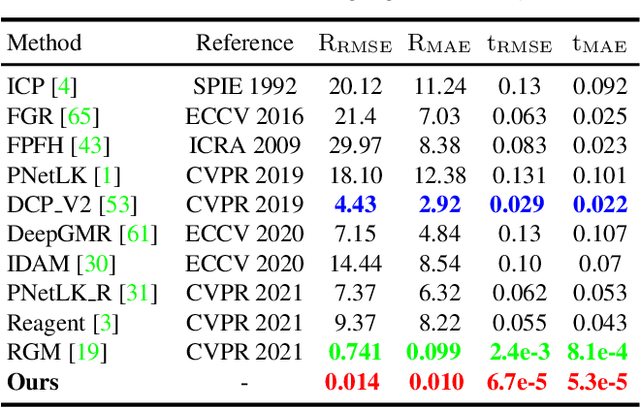
Recent Transformer-based methods have achieved advanced performance in point cloud registration by utilizing advantages of the Transformer in order-invariance and modeling dependency to aggregate information. However, they still suffer from indistinct feature extraction, sensitivity to noise, and outliers. The reasons are: (1) the adoption of CNNs fails to model global relations due to their local receptive fields, resulting in extracted features susceptible to noise; (2) the shallow-wide architecture of Transformers and lack of positional encoding lead to indistinct feature extraction due to inefficient information interaction; (3) the omission of geometrical compatibility leads to inaccurate classification between inliers and outliers. To address above limitations, a novel full Transformer network for point cloud registration is proposed, named the Deep Interaction Transformer (DIT), which incorporates: (1) a Point Cloud Structure Extractor (PSE) to model global relations and retrieve structural information with Transformer encoders; (2) a deep-narrow Point Feature Transformer (PFT) to facilitate deep information interaction across two point clouds with positional encoding, such that Transformers can establish comprehensive associations and directly learn relative position between points; (3) a Geometric Matching-based Correspondence Confidence Evaluation (GMCCE) method to measure spatial consistency and estimate inlier confidence by designing the triangulated descriptor. Extensive experiments on clean, noisy, partially overlapping point cloud registration demonstrate that our method outperforms state-of-the-art methods.