 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViIK: Flow-based Vision Inverse Kinematics Solver with Fusing Collision Checking
Aug 21, 2024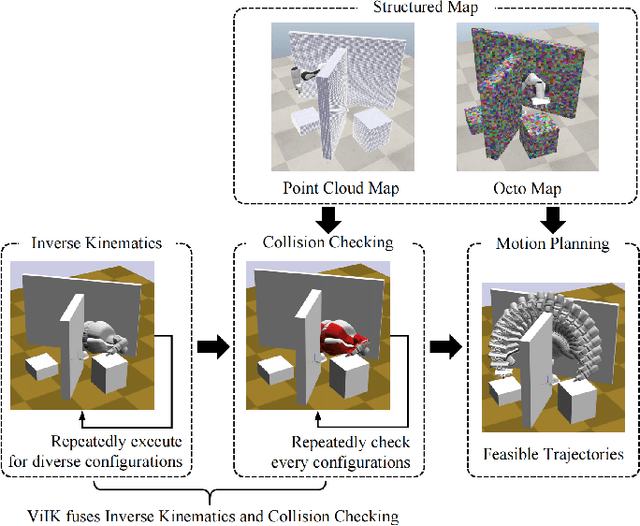
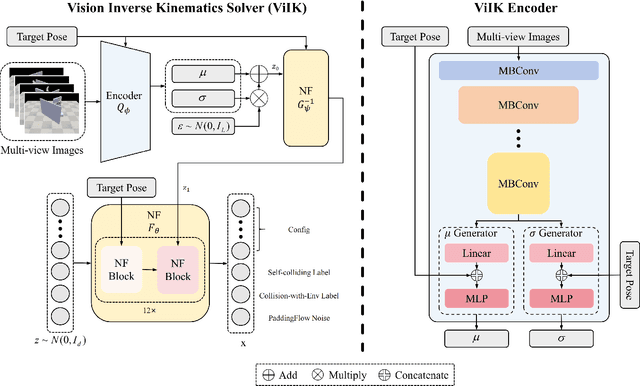
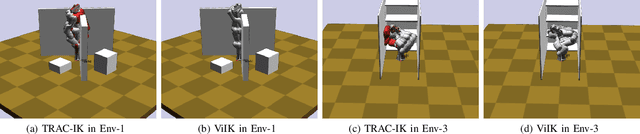
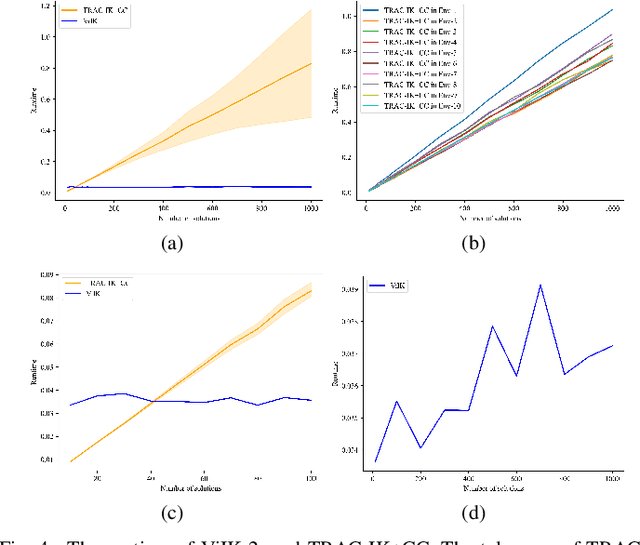
Inverse Kinematics (IK) is to find the robot's configurations that satisfy the target pose of the end effector. In motion planning, diverse configurations were required in case a feasible trajectory was not found. Meanwhile, collision checking (CC), e.g. Oriented bounding box (OBB), Discrete Oriented Polytope (DOP), and Quickhull \cite{quickhull}, needs to be done for each configuration provided by the IK solver to ensure every goal configuration for motion planning is available. This means the classical IK solver and CC algorithm should be executed repeatedly for every configuration. Thus, the preparation time is long when the required number of goal configurations is large, e.g. motion planning in cluster environments. Moreover, structured maps, which might be difficult to obtain, were required by classical collision-checking algorithms. To sidestep such two issues, we propose a flow-based vision method that can output diverse available configurations by fusing inverse kinematics and collision checking, named Vision Inverse Kinematics solver (ViIK). Moreover, ViIK uses RGB images as the perception of environments. ViIK can output 1000 configurations within 40 ms, and the accuracy is about 3 millimeters and 1.5 degrees. The higher accuracy can be obtained by being refined by the classical IK solver within a few iterations. The self-collision rates can be lower than 2%. The collision-with-env rates can be lower than 10% in most scenes. The code is available at: https://github.com/AdamQLMeng/ViIK.
PaddingFlow: Improving Normalizing Flows with Padding-Dimensional Noise
Mar 13, 2024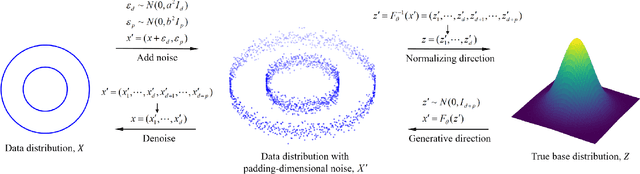
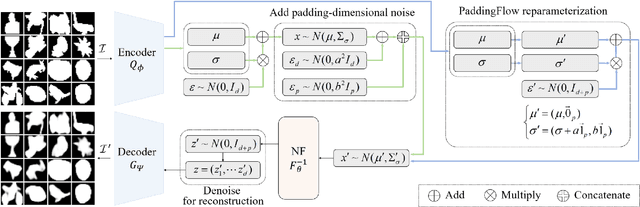
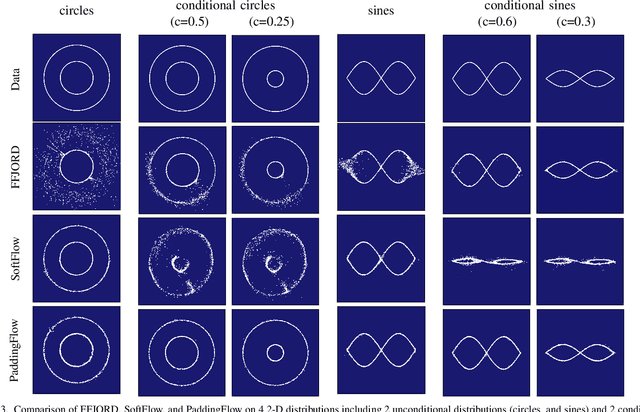

Normalizing flow is a generative modeling approach with efficient sampling. However, Flow-based models suffer two issues, which are manifold and discrete data. If the target distribution is a manifold, which means the dimension of the latent target distribution and the dimension of the data distribution are unmatched, flow-based models might perform badly. Discrete data makes flow-based models collapse into a degenerate mixture of point masses. In this paper, to sidestep such two issues we propose PaddingFlow, a novel dequantization method, which improves normalizing flows with padding-dimensional noise. PaddingFlow is easy to implement, computationally cheap, widely suitable for various tasks, and generates samples that are unbiased estimations of the data. Especially, our method can overcome the limitation of existing dequantization methods that have to change the data distribution, which might degrade performance. We validate our method on the main benchmarks of unconditional density estimation, including five tabular datasets and four image datasets for VAE models, and the IK experiments which are conditional density estimation. The results show that PaddingFlow can provide improvement on all tasks in this paper.
PPNet: A Novel Neural Network Structure for End-to-End Near-Optimal Path Planning
Jan 18, 2024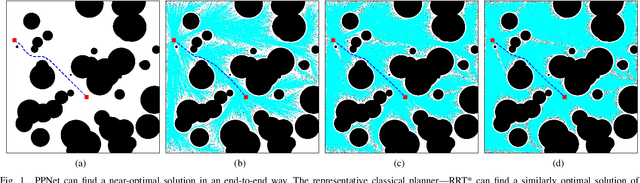
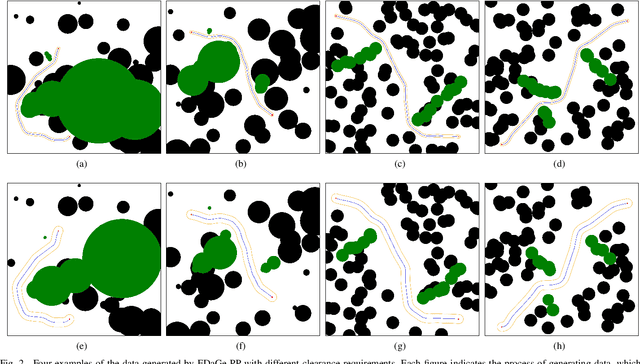
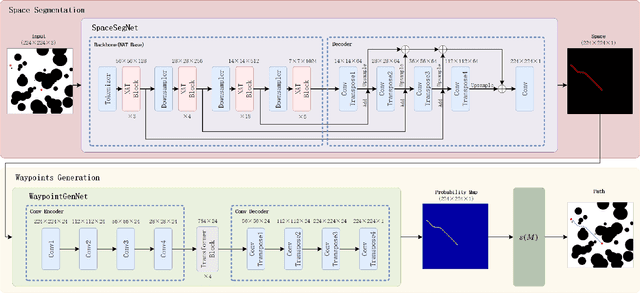
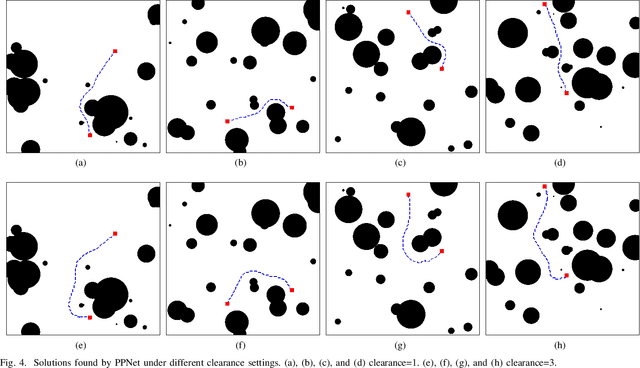
The classical path planners, such as sampling-based path planners, have the limitations of sensitivity to the initial solution and slow convergence to the optimal solution. However, finding a near-optimal solution in a short period is challenging in many applications such as the autonomous vehicle with limited power/fuel. To achieve an end-to-end near-optimal path planner, we first divide the path planning problem into two subproblems, which are path's space segmentation and waypoints generation in the given path's space. We further propose a two-level cascade neural network named Path Planning Network (PPNet) to solve the path planning problem by solving the abovementioned subproblems. Moreover, we propose a novel efficient data generation method for path planning named EDaGe-PP. The results show the total computation time is less than 1/33 and the success rate of PPNet trained by the dataset that is generated by EDaGe-PP is about $2 \times$ compared to other methods. We validate PPNet against state-of-the-art path planning methods. The results show PPNet can find a near-optimal solution in 15.3ms, which is much shorter than the state-of-the-art path planners.