 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViIK: Flow-based Vision Inverse Kinematics Solver with Fusing Collision Checking
Paper and Code
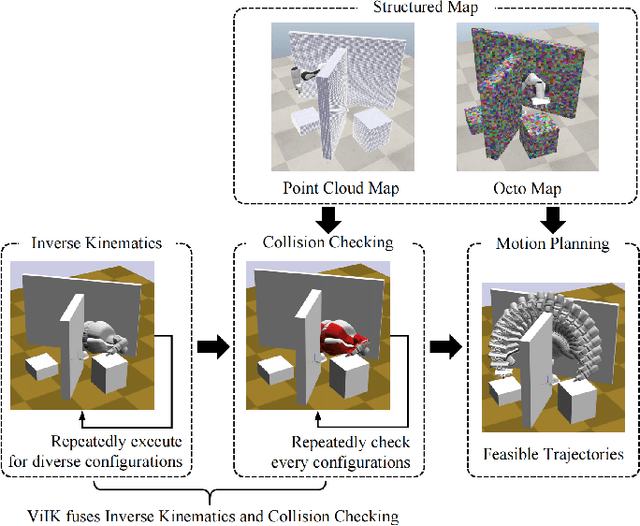
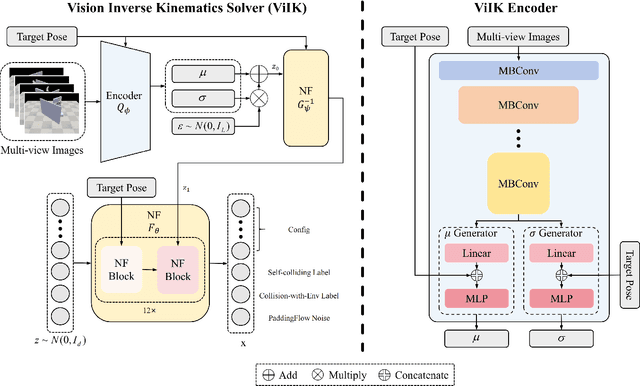
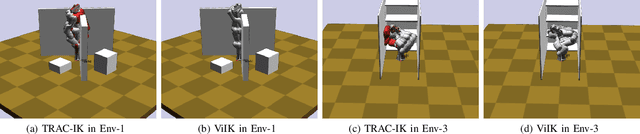
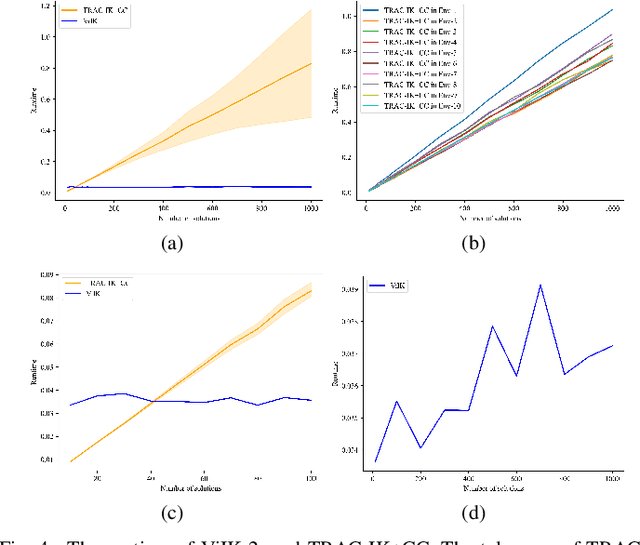
Inverse Kinematics (IK) is to find the robot's configurations that satisfy the target pose of the end effector. In motion planning, diverse configurations were required in case a feasible trajectory was not found. Meanwhile, collision checking (CC), e.g. Oriented bounding box (OBB), Discrete Oriented Polytope (DOP), and Quickhull \cite{quickhull}, needs to be done for each configuration provided by the IK solver to ensure every goal configuration for motion planning is available. This means the classical IK solver and CC algorithm should be executed repeatedly for every configuration. Thus, the preparation time is long when the required number of goal configurations is large, e.g. motion planning in cluster environments. Moreover, structured maps, which might be difficult to obtain, were required by classical collision-checking algorithms. To sidestep such two issues, we propose a flow-based vision method that can output diverse available configurations by fusing inverse kinematics and collision checking, named Vision Inverse Kinematics solver (ViIK). Moreover, ViIK uses RGB images as the perception of environments. ViIK can output 1000 configurations within 40 ms, and the accuracy is about 3 millimeters and 1.5 degrees. The higher accuracy can be obtained by being refined by the classical IK solver within a few iterations. The self-collision rates can be lower than 2%. The collision-with-env rates can be lower than 10% in most scenes. The code is available at: https://github.com/AdamQLMeng/ViIK.