 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExorcising ''Wraith'': Protecting LiDAR-based Object Detector in Automated Driving System from Appearing Attacks
Mar 17, 2023



Automated driving systems rely on 3D object detectors to recognize possible obstacles from LiDAR point clouds. However, recent works show the adversary can forge non-existent cars in the prediction results with a few fake points (i.e., appearing attack). By removing statistical outliers, existing defenses are however designed for specific attacks or biased by predefined heuristic rules. Towards more comprehensive mitigation, we first systematically inspect the mechanism of recent appearing attacks: Their common weaknesses are observed in crafting fake obstacles which (i) have obvious differences in the local parts compared with real obstacles and (ii) violate the physical relation between depth and point density. In this paper, we propose a novel plug-and-play defensive module which works by side of a trained LiDAR-based object detector to eliminate forged obstacles where a major proportion of local parts have low objectness, i.e., to what degree it belongs to a real object. At the core of our module is a local objectness predictor, which explicitly incorporates the depth information to model the relation between depth and point density, and predicts each local part of an obstacle with an objectness score. Extensive experiments show, our proposed defense eliminates at least 70% cars forged by three known appearing attacks in most cases, while, for the best previous defense, less than 30% forged cars are eliminated. Meanwhile, under the same circumstance, our defense incurs less overhead for AP/precision on cars compared with existing defenses. Furthermore, We validate the effectiveness of our proposed defense on simulation-based closed-loop control driving tests in the open-source system of Baidu's Apollo.
A Certifiable Security Patch for Object Tracking in Self-Driving Systems via Historical Deviation Modeling
Jul 18, 2022

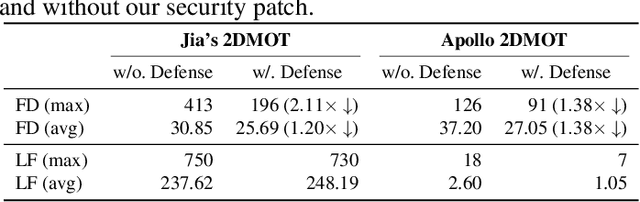

Self-driving cars (SDC) commonly implement the perception pipeline to detect the surrounding obstacles and track their moving trajectories, which lays the ground for the subsequent driving decision making process. Although the security of obstacle detection in SDC is intensively studied, not until very recently the attackers start to exploit the vulnerability of the tracking module. Compared with solely attacking the object detectors, this new attack strategy influences the driving decision more effectively with less attack budgets. However, little is known on whether the revealed vulnerability remains effective in end-to-end self-driving systems and, if so, how to mitigate the threat. In this paper, we present the first systematic research on the security of object tracking in SDC. Through a comprehensive case study on the full perception pipeline of a popular open-sourced self-driving system, Baidu's Apollo, we prove the mainstream multi-object tracker (MOT) based on Kalman Filter (KF) is unsafe even with an enabled multi-sensor fusion mechanism. Our root cause analysis reveals, the vulnerability is innate to the design of KF-based MOT, which shall error-handle the prediction results from the object detectors yet the adopted KF algorithm is prone to trust the observation more when its deviation from the prediction is larger. To address this design flaw, we propose a simple yet effective security patch for KF-based MOT, the core of which is an adaptive strategy to balance the focus of KF on observations and predictions according to the anomaly index of the observation-prediction deviation, and has certified effectiveness against a generalized hijacking attack model. Extensive evaluation on $4$ KF-based existing MOT implementations (including 2D and 3D, academic and Apollo ones) validate the defense effectiveness and the trivial performance overhead of our approach.