 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Temporal Multi-Gate Mixture-of-Experts Approach for Vehicle Trajectory and Driving Intention Prediction
Aug 01, 2023



Accurate Vehicle Trajectory Prediction is critical for automated vehicles and advanced driver assistance systems. Vehicle trajectory prediction consists of two essential tasks, i.e., longitudinal position prediction and lateral position prediction. There is a significant correlation between driving intentions and vehicle motion. In existing work, the three tasks are often conducted separately without considering the relationships between the longitudinal position, lateral position, and driving intention. In this paper, we propose a novel Temporal Multi-Gate Mixture-of-Experts (TMMOE) model for simultaneously predicting the vehicle trajectory and driving intention. The proposed model consists of three layers: a shared layer, an expert layer, and a fully connected layer. In the model, the shared layer utilizes Temporal Convolutional Networks (TCN) to extract temporal features. Then the expert layer is built to identify different information according to the three tasks. Moreover, the fully connected layer is used to integrate and export prediction results. To achieve better performance, uncertainty algorithm is used to construct the multi-task loss function. Finally, the publicly available CitySim dataset validates the TMMOE model, demonstrating superior performance compared to the LSTM model, achieving the highest classification and regression results. Keywords: Vehicle trajectory prediction, driving intentions Classification, Multi-task
A Unified Approach to Lane Change Intention Recognition and Driving Status Prediction through TCN-LSTM and Multi-Task Learning Models
Apr 25, 2023
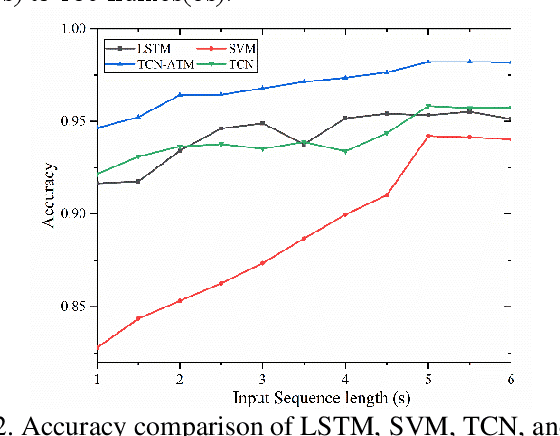
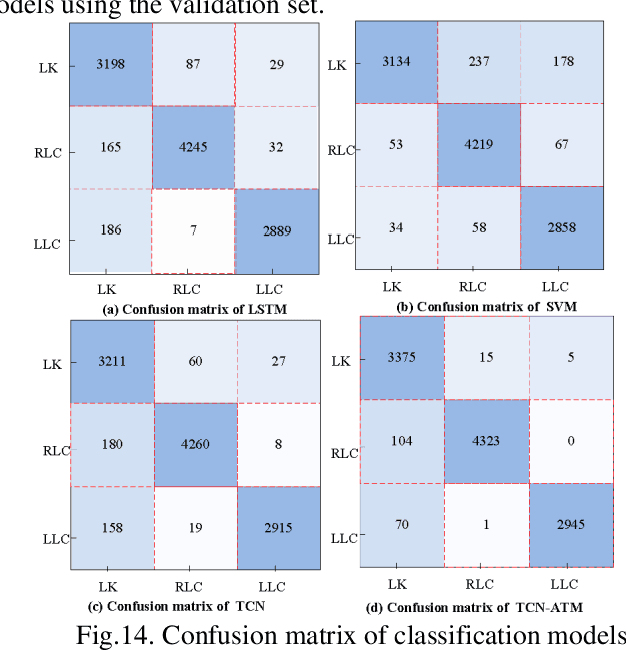
Lane change (LC) is a continuous and complex operation process. Accurately detecting and predicting LC processes can help traffic participants better understand their surrounding environment, recognize potential LC safety hazards, and improve traffic safety. This present paper focuses on LC processes, developing an LC intention recognition (LC-IR) model and an LC status prediction (LC-SP) model. A novel ensemble temporal convolutional network with Long Short-Term Memory units (TCN-LSTM) is first proposed to capture long-range dependencies in sequential data. Then, three multi-task models (MTL-LSTM, MTL-TCN, MTL-TCN -LSTM) are developed to capture the intrinsic relationship among output indicators. Furthermore, a unified modeling framework for LC intention recognition and driving status prediction (LC-IR-SP) is developed. To validate the performance of the proposed models, a total number of 1023 vehicle trajectories is extracted from the CitySim dataset. The Pearson coefficient is employed to determine the related indicators. The results indicate that using150 frames as input length, the TCN-LSTM model with 96.67% accuracy outperforms TCN and LSTM models in LC intention classification and provides more balanced results for each class. Three proposed multi-tasking learning models provide markedly increased performance compared to corresponding single-task models, with an average reduction of 24.24% and 22.86% in the Mean Absolute Error (MAE) and Root Mean Square Error (RMSE), respectively. The developed LC-IR-SP model has promising applications for autonomous vehicles to identity lane change behaviors, calculate a real-time traffic conflict index and improve vehicle control strategies.