 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision Mamba: Cutting-Edge Classification of Alzheimer's Disease with 3D MRI Scans
Jun 09, 2024Classifying 3D MRI images for early detection of Alzheimer's disease is a critical task in medical imaging. Traditional approaches using Convolutional Neural Networks (CNNs) and Transformers face significant challenges in this domain. CNNs, while effective in capturing local spatial features, struggle with long-range dependencies and often require extensive computational resources for high-resolution 3D data. Transformers, on the other hand, excel in capturing global context but suffer from quadratic complexity in inference time and require substantial memory, making them less efficient for large-scale 3D MRI data. To address these limitations, we propose the use of Vision Mamba, an advanced model based on State Space Models (SSMs), for the classification of 3D MRI images to detect Alzheimer's disease. Vision Mamba leverages dynamic state representations and the selective scan algorithm, allowing it to efficiently capture and retain important spatial information across 3D volumes. By dynamically adjusting state transitions based on input features, Vision Mamba can selectively retain relevant information, leading to more accurate and computationally efficient processing of 3D MRI data. Our approach combines the parallelizable nature of convolutional operations during training with the efficient, recurrent processing of states during inference. This architecture not only improves computational efficiency but also enhances the model's ability to handle long-range dependencies within 3D medical images. Experimental results demonstrate that Vision Mamba outperforms traditional CNN and Transformer models accuracy, making it a promising tool for the early detection of Alzheimer's disease using 3D MRI data.
Secure and Privacy-Preserving Automated End-to-End Integrated IoT-Edge-Artificial Intelligence-Blockchain Monitoring System for Diabetes Mellitus Prediction
Nov 13, 2022Diabetes Mellitus, one of the leading causes of death worldwide, has no cure till date and can lead to severe health complications, such as retinopathy, limb amputation, cardiovascular diseases, and neuronal disease, if left untreated. Consequently, it becomes crucial to take precautionary measures to avoid/predict the occurrence of diabetes. Machine learning approaches have been proposed and evaluated in the literature for diabetes prediction. This paper proposes an IoT-edge-Artificial Intelligence (AI)-blockchain system for diabetes prediction based on risk factors. The proposed system is underpinned by the blockchain to obtain a cohesive view of the risk factors data from patients across different hospitals and to ensure security and privacy of the user data. Furthermore, we provide a comparative analysis of different medical sensors, devices, and methods to measure and collect the risk factors values in the system. Numerical experiments and comparative analysis were carried out between our proposed system, using the most accurate random forest (RF) model, and the two most used state-of-the-art machine learning approaches, Logistic Regression (LR) and Support Vector Machine (SVM), using three real-life diabetes datasets. The results show that the proposed system using RF predicts diabetes with 4.57% more accuracy on average compared to LR and SVM, with 2.87 times more execution time. Data balancing without feature selection does not show significant improvement. The performance is improved by 1.14% and 0.02% after feature selection for PIMA Indian and Sylhet datasets respectively, while it reduces by 0.89% for MIMIC III.
Chaotic Transitions in Wall Following Robots
Aug 25, 2009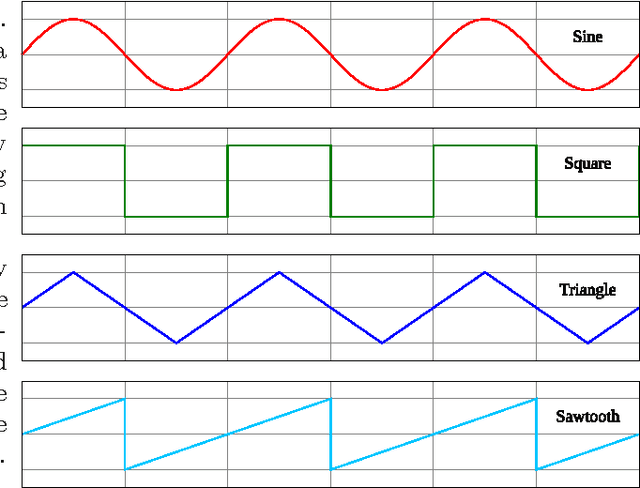
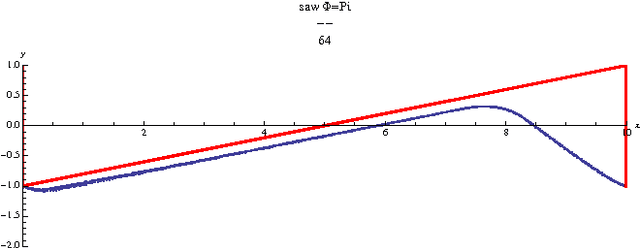
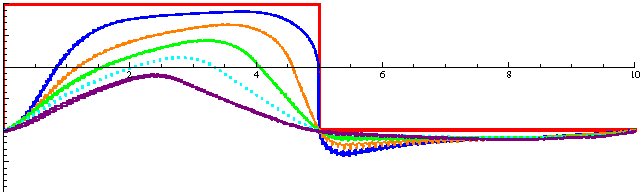
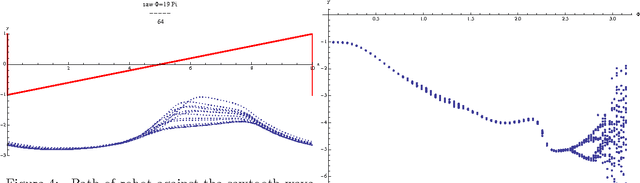
In this paper we examine how simple agents similar to Braitenberg vehicles can exhibit chaotic movement patterns. The agents are wall following robots as described by Steve Mesburger and Alfred Hubler in their paper "Chaos in Wall Following Robots". These agents uses a simple forward facing distance sensor, with a limited field of view "phi" for navigation. An agent drives forward at a constant velocity and uses the sensor to turn right when it is too close to an object and left when it is too far away. For a flat wall the agent stays a fixed distance from the wall and travels along it, regardless of the sensor's capabilities. But, if the wall represents a periodic function, the agent drives on a periodic path when the sensor has a narrow field of view. The agent's trajectory transitions to chaos when the sensor's field of view is increased. Numerical experiments were performed with square, triangle, and sawtooth waves for the wall, to find this pattern. The bifurcations of the agents were analyzed, finding both border collision and period doubling bifurcations. Detailed experimental results will be reported separately.