 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChaotic Transitions in Wall Following Robots
Aug 25, 2009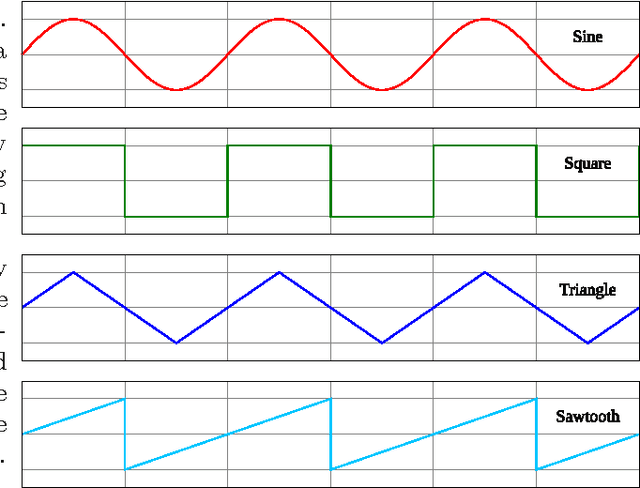
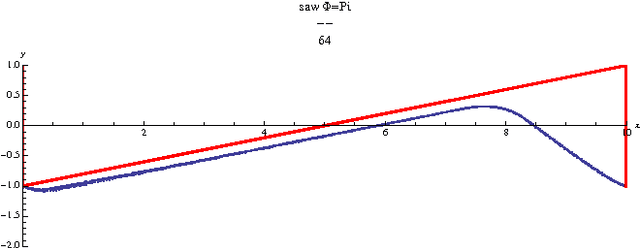
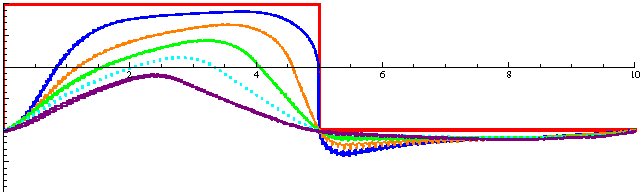
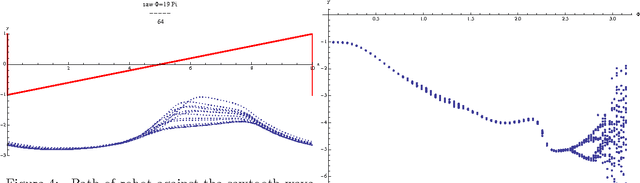
In this paper we examine how simple agents similar to Braitenberg vehicles can exhibit chaotic movement patterns. The agents are wall following robots as described by Steve Mesburger and Alfred Hubler in their paper "Chaos in Wall Following Robots". These agents uses a simple forward facing distance sensor, with a limited field of view "phi" for navigation. An agent drives forward at a constant velocity and uses the sensor to turn right when it is too close to an object and left when it is too far away. For a flat wall the agent stays a fixed distance from the wall and travels along it, regardless of the sensor's capabilities. But, if the wall represents a periodic function, the agent drives on a periodic path when the sensor has a narrow field of view. The agent's trajectory transitions to chaos when the sensor's field of view is increased. Numerical experiments were performed with square, triangle, and sawtooth waves for the wall, to find this pattern. The bifurcations of the agents were analyzed, finding both border collision and period doubling bifurcations. Detailed experimental results will be reported separately.