 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSBI-RAG: Enhancing Math Word Problem Solving for Students through Schema-Based Instruction and Retrieval-Augmented Generation
Oct 17, 2024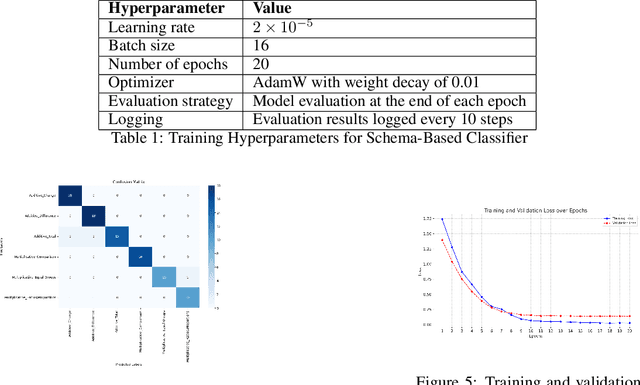
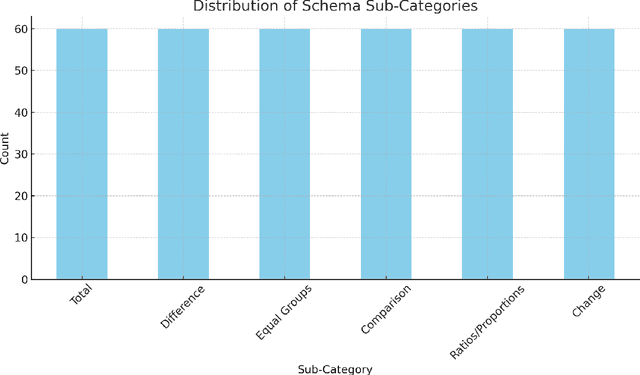
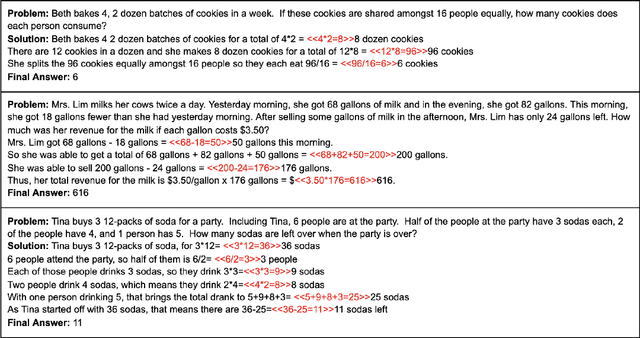
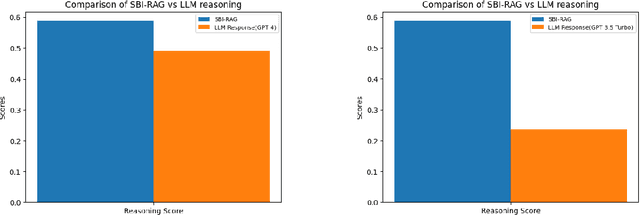
Many students struggle with math word problems (MWPs), often finding it difficult to identify key information and select the appropriate mathematical operations.Schema-based instruction (SBI) is an evidence-based strategy that helps students categorize problems based on their structure, improving problem-solving accuracy. Building on this, we propose a Schema-Based Instruction Retrieval-Augmented Generation (SBI-RAG) framework that incorporates a large language model (LLM).Our approach emphasizes step-by-step reasoning by leveraging schemas to guide solution generation. We evaluate its performance on the GSM8K dataset, comparing it with GPT-4 and GPT-3.5 Turbo, and introduce a "reasoning score" metric to assess solution quality. Our findings suggest that SBI-RAG enhances reasoning clarity and problem-solving accuracy, potentially providing educational benefits for students
ReProHRL: Towards Multi-Goal Navigation in the Real World using Hierarchical Agents
Aug 17, 2023Robots have been successfully used to perform tasks with high precision. In real-world environments with sparse rewards and multiple goals, learning is still a major challenge and Reinforcement Learning (RL) algorithms fail to learn good policies. Training in simulation environments and then fine-tuning in the real world is a common approach. However, adapting to the real-world setting is a challenge. In this paper, we present a method named Ready for Production Hierarchical RL (ReProHRL) that divides tasks with hierarchical multi-goal navigation guided by reinforcement learning. We also use object detectors as a pre-processing step to learn multi-goal navigation and transfer it to the real world. Empirical results show that the proposed ReProHRL method outperforms the state-of-the-art baseline in simulation and real-world environments in terms of both training time and performance. Although both methods achieve a 100% success rate in a simple environment for single goal-based navigation, in a more complex environment and multi-goal setting, the proposed method outperforms the baseline by 18% and 5%, respectively. For the real-world implementation and proof of concept demonstration, we deploy the proposed method on a nano-drone named Crazyflie with a front camera to perform multi-goal navigation experiments.