 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClimate Adaptation: Reliably Predicting from Imbalanced Satellite Data
Apr 26, 2020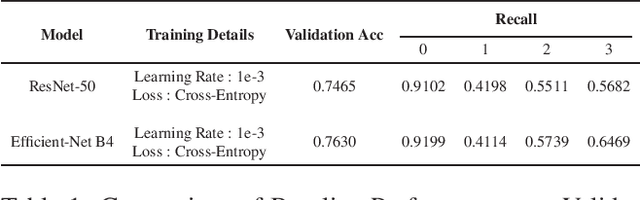

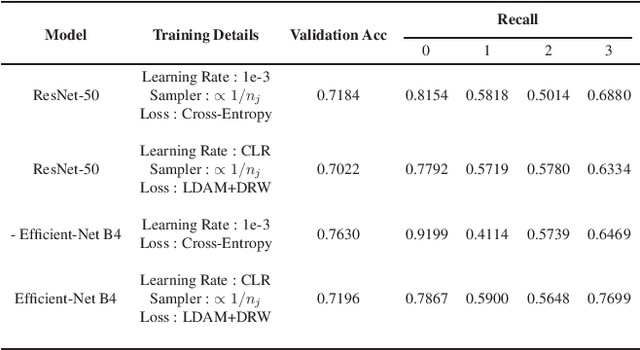

The utility of aerial imagery (Satellite, Drones) has become an invaluable information source for cross-disciplinary applications, especially for crisis management. Most of the mapping and tracking efforts are manual which is resource-intensive and often lead to delivery delays. Deep Learning methods have boosted the capacity of relief efforts via recognition, detection, and are now being used for non-trivial applications. However the data commonly available is highly imbalanced (similar to other real-life applications) which severely hampers the neural network's capabilities, this reduces robustness and trust. We give an overview on different kinds of techniques being used for handling such extreme settings and present solutions aimed at maximizing performance on minority classes using a diverse set of methods (ranging from architectural tuning to augmentation) which as a combination generalizes for all minority classes. We hope to amplify cross-disciplinary efforts by enhancing model reliability.
Planning Robot Motion using Deep Visual Prediction
Jun 24, 2019
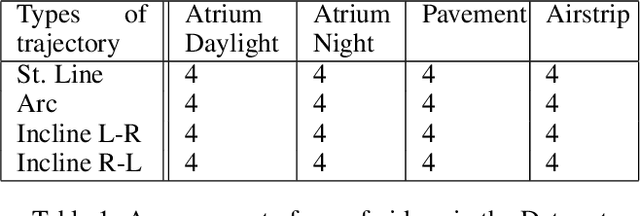
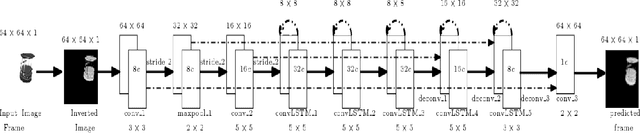

In this paper, we introduce a novel framework that can learn to make visual predictions about the motion of a robotic agent from raw video frames. Our proposed motion prediction network (PROM-Net) can learn in a completely unsupervised manner and efficiently predict up to 10 frames in the future. Moreover, unlike any other motion prediction models, it is lightweight and once trained it can be easily implemented on mobile platforms that have very limited computing capabilities. We have created a new robotic data set comprising LEGO Mindstorms moving along various trajectories in three different environments under different lighting conditions for testing and training the network. Finally, we introduce a framework that would use the predicted frames from the network as an input to a model predictive controller for motion planning in unknown dynamic environments with moving obstacles.