 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning Robot Motion using Deep Visual Prediction
Paper and Code
Jun 24, 2019
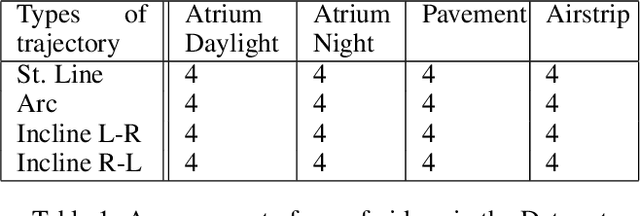
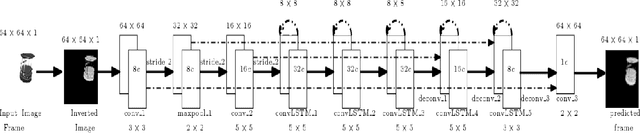

In this paper, we introduce a novel framework that can learn to make visual predictions about the motion of a robotic agent from raw video frames. Our proposed motion prediction network (PROM-Net) can learn in a completely unsupervised manner and efficiently predict up to 10 frames in the future. Moreover, unlike any other motion prediction models, it is lightweight and once trained it can be easily implemented on mobile platforms that have very limited computing capabilities. We have created a new robotic data set comprising LEGO Mindstorms moving along various trajectories in three different environments under different lighting conditions for testing and training the network. Finally, we introduce a framework that would use the predicted frames from the network as an input to a model predictive controller for motion planning in unknown dynamic environments with moving obstacles.