 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmenTory: A Fast and Flexible Polygon Augmentation Library
May 07, 2024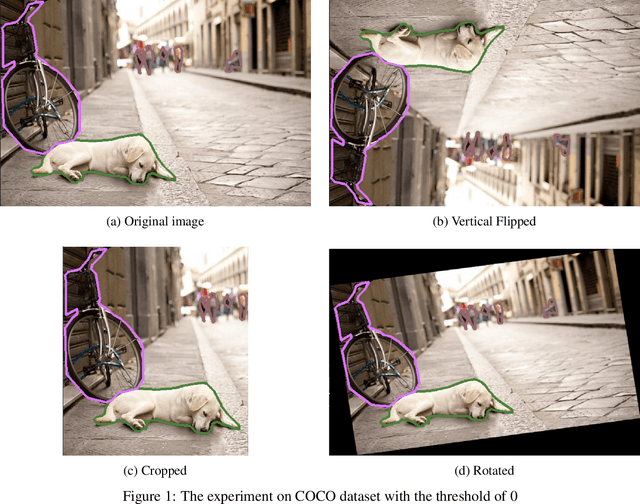

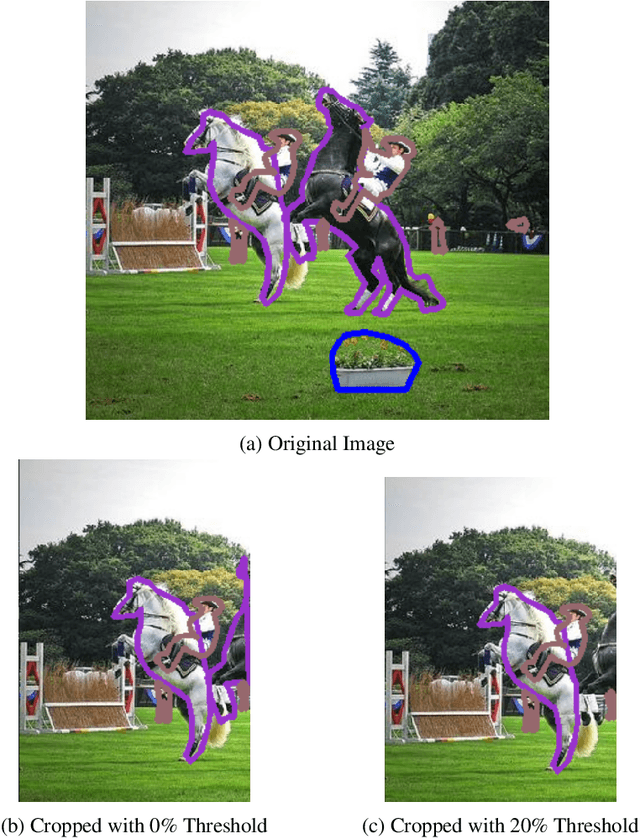
Data augmentation is a key technique for addressing the challenge of limited datasets, which have become a major component in the training procedures of image processing. Techniques such as geometric transformations and color space adjustments have been thoroughly tested for their ability to artificially expand training datasets and generate semi-realistic data for training purposes. Data augmentation is the most important key to addressing the challenge of limited datasets, which have become a major component of image processing training procedures. Data augmentation techniques, such as geometric transformations and color space adjustments, are thoroughly tested for their ability to artificially expand training datasets and generate semi-realistic data for training purposes. Polygons play a crucial role in instance segmentation and have seen a surge in use across advanced models, such as YOLOv8. Despite their growing popularity, the lack of specialized libraries hampers the polygon-augmentation process. This paper introduces a novel solution to this challenge, embodied in the newly developed AugmenTory library. Notably, AugmenTory offers reduced computational demands in both time and space compared to existing methods. Additionally, the library includes a postprocessing thresholding feature. The AugmenTory package is publicly available on GitHub, where interested users can access the source code: https://github.com/Smartory/AugmenTory
A Segment-Wise Gaussian Process-Based Ground Segmentation With Local Smoothness Estimation
Oct 19, 2022
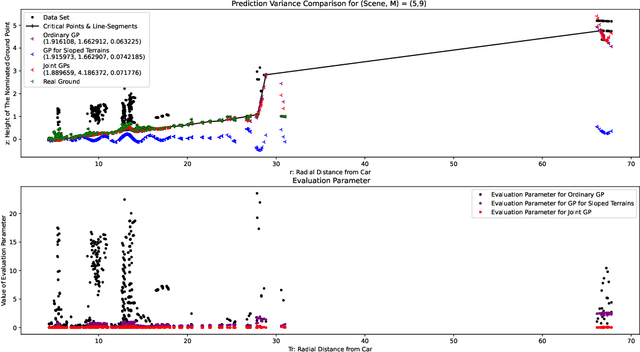
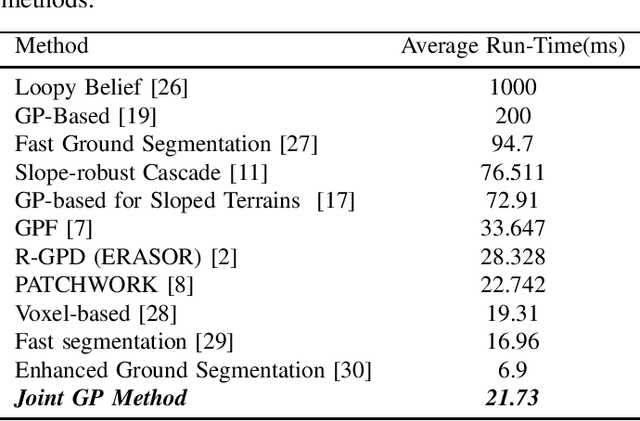
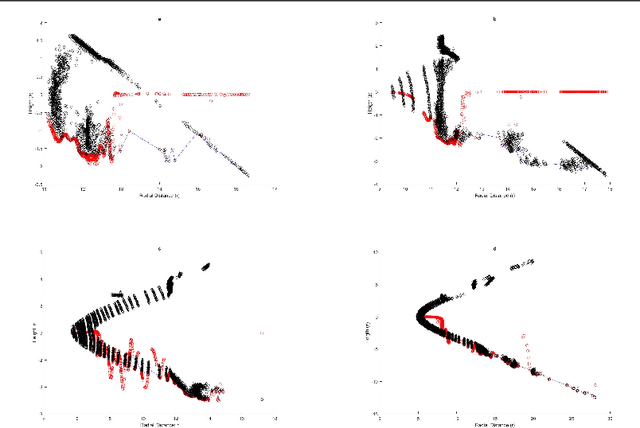
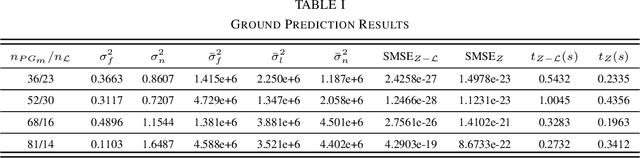
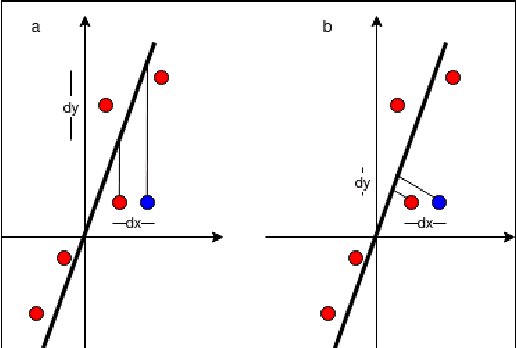
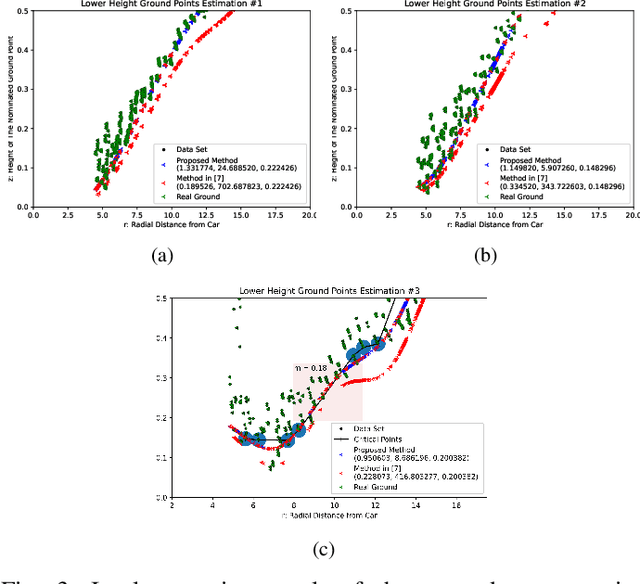
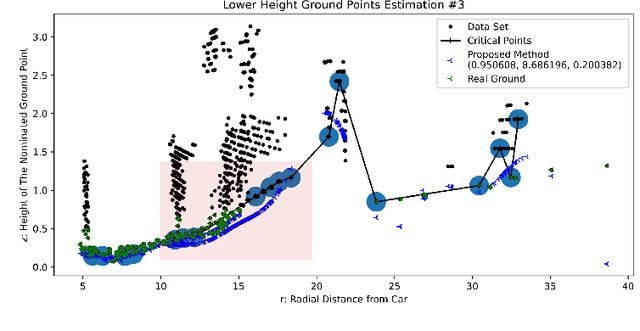
Both in terrestrial and extraterrestrial environments, the precise and informative model of the ground and the surface ahead is crucial for navigation and obstacle avoidance. The ground surface is not always flat and it may be sloped, bumpy and rough specially in off-road terrestrial scenes. In bumpy and rough scenes the functional relationship of the surface-related features may vary in different areas of the ground, as the structure of the ground surface may vary suddenly and further the measured point cloud of the ground does not bear smoothness. Thus, the ground-related features must be obtained based on local estimates or even point estimates. To tackle this problem, the segment-wise GP-based ground segmentation method with local smoothness estimation is proposed. This method is an extension to our previous method in which a realistic measurement of the length-scale values were provided for the covariance kernel in each line-segment to give precise estimation of the ground for sloped terrains. In this extension, the value of the length-scale is estimated locally for each data point which makes it much more precise for the rough scenes while being not computationally complex and more robust to under-segmentation, sparsity and under-represent-ability. The segment-wise task is performed to estimate a partial continuous model of the ground for each radial range segment. Simulation results show the effectiveness of the proposed method to give a continuous and precise estimation of the ground surface in rough and bumpy scenes while being fast enough for real-world applications.
A Probabilistic Framework for Dynamic Object Recognition in 3D Environment With A Novel Continuous Ground Estimation Method
Jan 27, 2022In this thesis a probabilistic framework is developed and proposed for Dynamic Object Recognition in 3D Environments. A software package is developed using C++ and Python in ROS that performs the detection and tracking task. Furthermore, a novel Gaussian Process Regression (GPR) based method is developed to detect ground points in different urban scenarios of regular, sloped and rough. The ground surface behavior is assumed to only demonstrate local input-dependent smoothness. kernel's length-scales are obtained. Bayesian inference is implemented sing \textit{Maximum a Posteriori} criterion. The log-marginal likelihood function is assumed to be a multi-task objective function, to represent a whole-frame unbiased view of the ground at each frame because adjacent segments may not have similar ground structure in an uneven scene while having shared hyper-parameter values. Simulation results shows the effectiveness of the proposed method in uneven and rough scenes which outperforms similar Gaussian process based ground segmentation methods.
A Novel Gaussian Process Based Ground Segmentation Algorithm with Local-Smoothness Estimation
Dec 01, 2021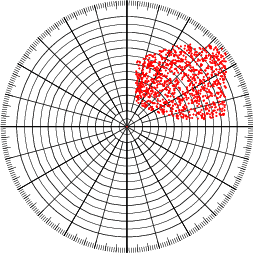
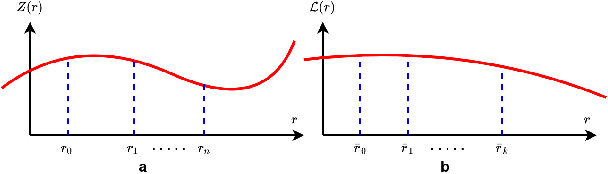
Autonomous Land Vehicles (ALV) shall efficiently recognize the ground in unknown environments. A novel $\mathcal{GP}$-based method is proposed for the ground segmentation task in rough driving scenarios. A non-stationary covariance function is utilized as the kernel for the $\mathcal{GP}$. The ground surface behavior is assumed to only demonstrate local-smoothness. Thus, point estimates of the kernel's length-scales are obtained. Thus, two Gaussian processes are introduced to separately model the observation and local characteristics of the data. While, the \textit{observation process} is used to model the ground, the \textit{latent process} is put on length-scale values to estimate point values of length-scales at each input location. Input locations for this latent process are chosen in a physically-motivated procedure to represent an intuition about ground condition. Furthermore, an intuitive guess of length-scale value is represented by assuming the existence of hypothetical surfaces in the environment that every bunch of data points may be assumed to be resulted from measurements from this surfaces. Bayesian inference is implemented using \textit{maximum a Posteriori} criterion. The log-marginal likelihood function is assumed to be a multi-task objective function, to represent a whole-frame unbiased view of the ground at each frame. Simulation results shows the effectiveness of the proposed method even in an uneven, rough scene which outperforms similar Gaussian process based ground segmentation methods. While adjacent segments do not have similar ground structure in an uneven scene, the proposed method gives an efficient ground estimation based on a whole-frame viewpoint instead of just estimating segment-wise probable ground surfaces.
A Gaussian Process-Based Ground Segmentation for Sloped Terrains
Nov 20, 2021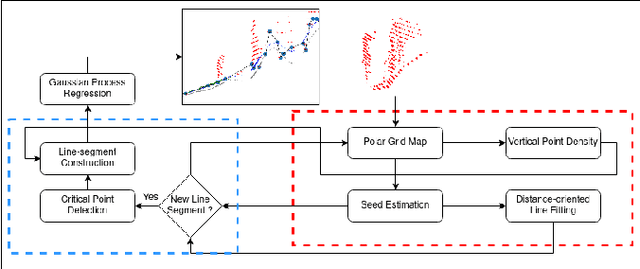
A Gaussian Process GP based ground segmentation method is proposed in this paper which is fully developed in a probabilistic framework. The proposed method tends to obtain a continuous realistic model of the ground. The LiDAR three-dimensional point cloud data is used as the sole source of the input data. The physical realities of the data are taken into account to properly classify sloped ground as well as the flat ones. Furthermore, unlike conventional ground segmentation methods, no height or distance constraints or limitations are required for the algorithm to be applied to take all the regarding physical behavior of the ground into account. Furthermore, a density-like parameter is defined to handle ground-like obstacle points in the ground candidate set. The non-stationary covariance kernel function is used for the Gaussian Process, by which Bayesian inference is applied using the maximum A Posteriori criterion. The log-marginal likelihood function is assumed to be a multi-task objective function, to represent a whole-frame unbiased view of the ground at each frame. Simulation results show the effectiveness of the proposed method even in an uneven, rough scene which outperforms similar Gaussian process-based ground segmentation methods.