 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Gaussian Process-Based Ground Segmentation for Sloped Terrains
Paper and Code
Nov 20, 2021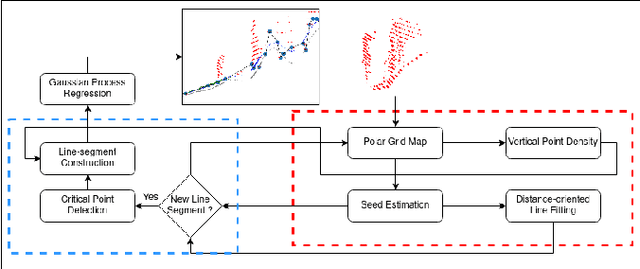
A Gaussian Process GP based ground segmentation method is proposed in this paper which is fully developed in a probabilistic framework. The proposed method tends to obtain a continuous realistic model of the ground. The LiDAR three-dimensional point cloud data is used as the sole source of the input data. The physical realities of the data are taken into account to properly classify sloped ground as well as the flat ones. Furthermore, unlike conventional ground segmentation methods, no height or distance constraints or limitations are required for the algorithm to be applied to take all the regarding physical behavior of the ground into account. Furthermore, a density-like parameter is defined to handle ground-like obstacle points in the ground candidate set. The non-stationary covariance kernel function is used for the Gaussian Process, by which Bayesian inference is applied using the maximum A Posteriori criterion. The log-marginal likelihood function is assumed to be a multi-task objective function, to represent a whole-frame unbiased view of the ground at each frame. Simulation results show the effectiveness of the proposed method even in an uneven, rough scene which outperforms similar Gaussian process-based ground segmentation methods.