 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrect-by-Construction Design of Contextual Robotic Missions Using Contracts
Jun 13, 2023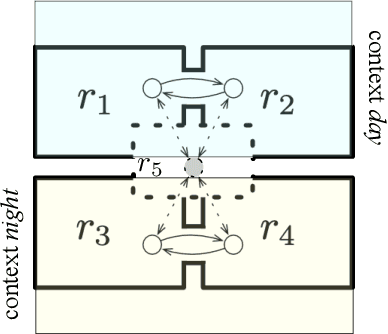
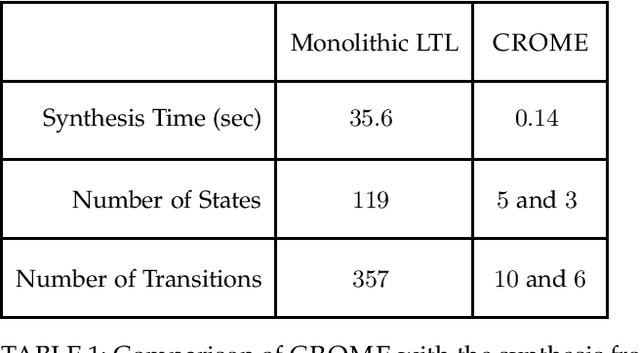
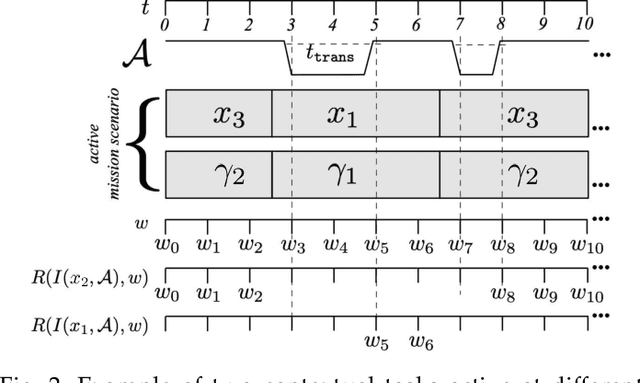
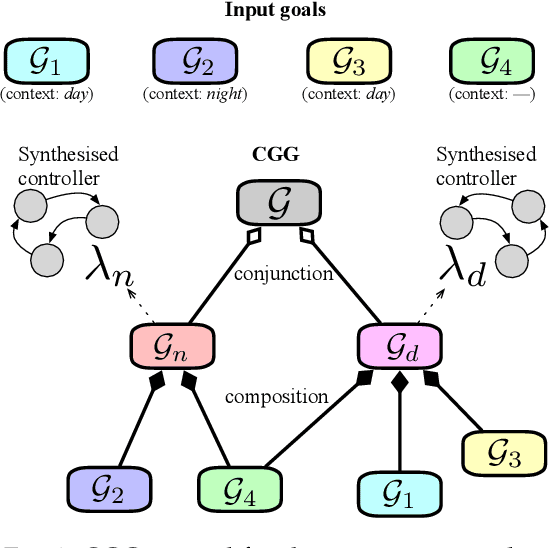
Effectively specifying and implementing robotic missions pose a set of challenges to software engineering for robotic systems, since they require formalizing and executing a robot's high-level tasks while considering various application scenarios and conditions, also known as contexts, in real-world operational environments. Writing correct mission specifications that explicitly account for multiple contexts can be a tedious and error-prone task. Moreover, as the number of context, hence the specification, becomes more complex, generating a correct-by-construction implementation, e.g., by using synthesis methods, can become intractable. A viable approach to address these issues is to decompose the mission specification into smaller sub-missions, with each sub-mission corresponding to a specific context. However, such a compositional approach would still pose challenges in ensuring the overall mission correctness. In this paper, we propose a new, compositional framework for the specification and implementation of contextual robotic missions using assume-guarantee contracts. The mission specification is captured in a hierarchical and modular way and each sub-mission is synthesized as a robot controller. We address the problem of dynamically switching between sub-mission controllers while ensuring correctness under certain conditions.
A Grammar for the Representation of Unmanned Aerial Vehicles with 3D Topologies
Feb 27, 2023
We propose a context-sensitive grammar for the systematic exploration of the design space of the topology of 3D robots, particularly unmanned aerial vehicles. It defines production rules for adding components to an incomplete design topology modeled over a 3D grid. The rules are local. The grammar is simple, yet capable of modeling most existing UAVs as well as novel ones. It can be easily generalized to other robotic platforms. It can be thought of as a building block for any design exploration and optimization algorithm.
Contract-Based Specification Refinement and Repair for Mission Planning
Nov 21, 2022

We address the problem of modeling, refining, and repairing formal specifications for robotic missions using assume-guarantee contracts. We show how to model mission specifications at various levels of abstraction and implement them using a library of pre-implemented specifications. Suppose the specification cannot be met using components from the library. In that case, we compute a proxy for the best approximation to the specification that can be generated using elements from the library. Afterward, we propose a systematic way to either 1) search for and refine the `missing part' of the specification that the library cannot meet or 2) repair the current specification such that the existing library can refine it. Our methodology for searching and repairing mission requirements leverages the quotient, separation, composition, and merging operations between contracts.